

Team 25: Robot for Dynamic Satellite Simulation
Abstract
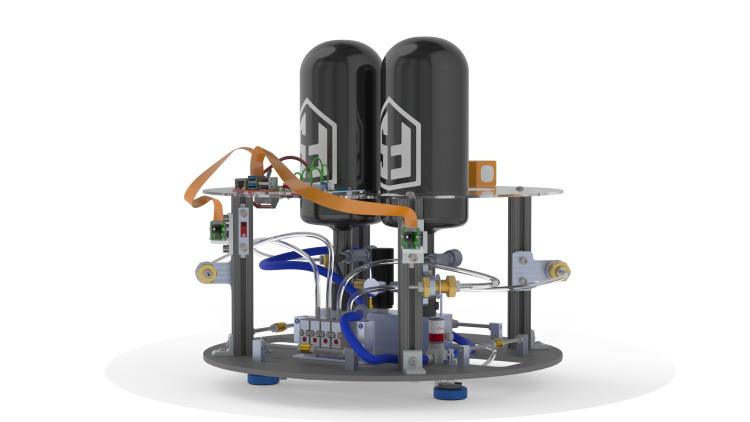
To reduce the cost of testing satellite algorithms in space, our team designed and built a hovercraft that simulates satellite movement in frictionless 2D space using compressed air. This system is a more realistic environment for testing guidance, navigation, and control (GNC) algorithms than previous ground-based solutions, and an inexpensive, less risky alternative to testing in space.
Sponsor
Seirra Space
Director
Matthew Tabor
Team Members
- Em Carpenter
- Evan Gassiot
- Alex Jessop
- Alex Livingston
- Jonny Lunney
- Alex Mueller
- Matthew Regier
- Carter Sheplee
- Erik Sorenson
- Andy Sultan