
Team 07: A Soft Robot for Surgical Interventions
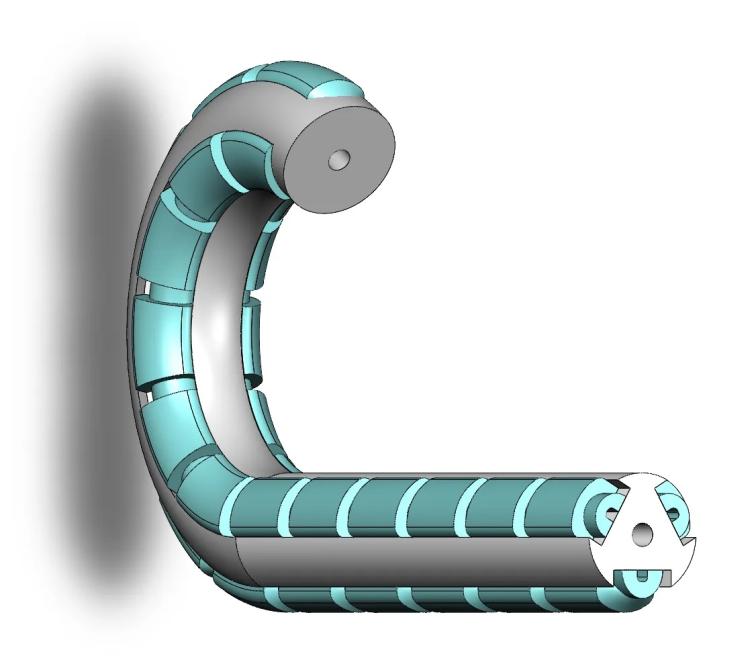
A soft robot design that demonstrates the desired motion of actuation in order to safely maneuver through the lung during bronchoscopy.
During a bronchoscopy, a needle is passed through the airway to collect tissue samples for cancer diagnoses. Soft robots are relatively novel, yet exemplary in their adaptability in unpredictable environments and increased safety in human-robot interactions. By replacing the distal end of a catheter with a soft robot, we aim to make bronchoscopies safer for patients and easier for physicians.
Sponsorship
Medtronic
Director
Drew Wilson
Team Members
- Maxwell P. Anderson
- Sean Dunkelman
- Christopher Gonzalez-Millan
- Brady King
- Isaac Martinez
- Bradley Nam
- Caitlyn Robinson
- Renée Schnettler
- William Wang
- William Watkins