
Origami comes to life with new shape-changing materials
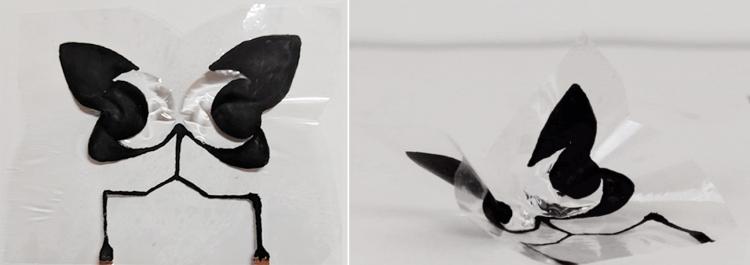
An Electriflow butterfly flaps its wings. (Credit: Purnendu)
Imagine opening up a book of nature photos only to see a kaleidoscope of graceful butterflies flutter out from the page.
Such fanciful storybooks might soon be possible thanks to the work of a team of designers and engineers at CU Boulder’s ATLAS Institute. The group is drawing from new advancements in the field of soft robotics to develop shape-changing objects that are paper-thin, fast-moving and almost completely silent.
[video:https://youtu.be/Zd8eKgB9lbs]
The researchers’ early creations, which they’ve dubbed “Electriflow,” include origami cranes that can bend their necks, flower petals that wiggle with the touch of a button and, yes, fluttering insects.
“Usually, books about butterflies are static,” said Purnendu, a graduate student at CU Boulder who is leading the project and who goes by a singular name. “But could you have a butterfly flap its wings within a book? We’ve shown that it’s possible.”
He and his colleagues presented their results recently at the Association for Computing Machinery’s 2021 Designing Interactive Systems (DIS) conference.
Artificial muscles
Purnendu explained that the team’s Electriflow designs don’t require motors or other traditional machine parts to come to life—making them soft to the touch, just like real butterflies. They’re inspired by a class of “artificial muscles” that were initially developed by researcher led by Christoph Keplinger at CU Boulder and are now available commercially through a company called Artimus Robotics.
Artimus taps into a technology called hydraulically amplified self-healing electrostatic (HASEL) actuators. Unlike traditional robotic parts, which are often made of rigid metal, HASEL actuators get their power from fluids. The actuators rely on electrostatic forces to push oil around in sealed plastic pouches, said Eric Acome, a former CU Boulder graduate student who helped to pioneer the actuator technology. Picture how the shape of a ketchup packet will change when you squeeze one side.
“One of the main benefits of these actuators is that they’re versatile,” said Acome, coauthor of the new study and the chief technology officer at Artimus Robotics. “They’re just pouches, but depending on the shape of that pouch, you can generate different kinds of movement.”

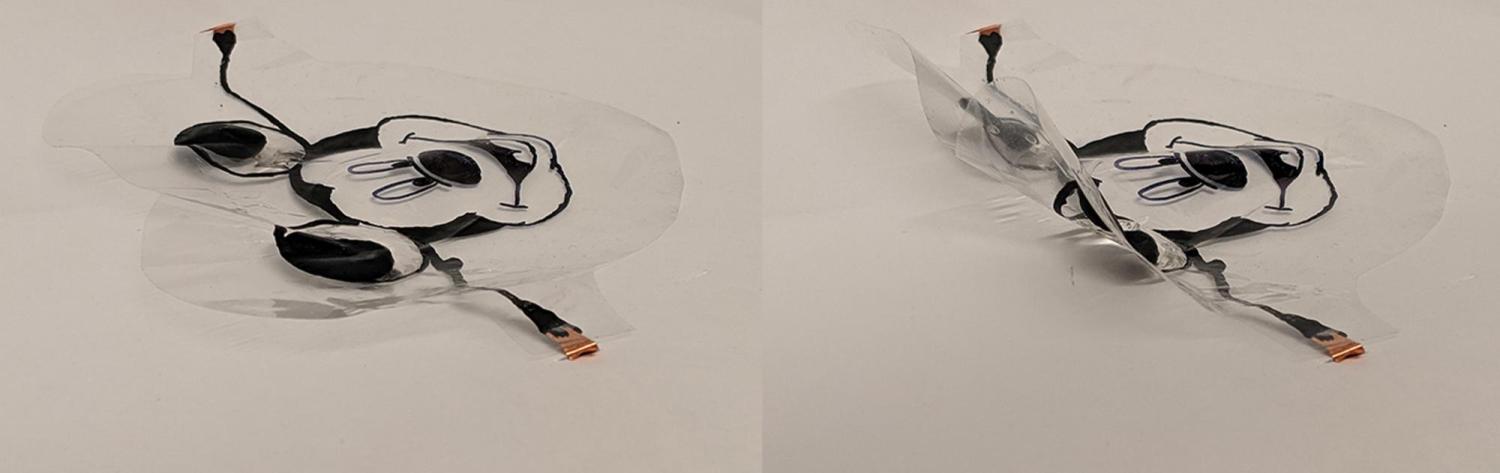
Top: An Electriflow butterfly and flower move inside the pages of a book; bottom: Electriflow can also create moving cartoons. (Credits: Purnendu)
They also emulate the natural world in which organisms of all kinds (think pufferfish or Venus fly traps) change their shapes to scare away predators and trap prey.
“Shape changing is a big part of communication and survival for certain animals,” Purnendu said. “Engineers have been on a quest to develop similar kinds of functions for computer interfaces.”
Wing flaps
Purnendu wondered if he could use the same concept as Artimus Robotics, or oils sloshing around inside pouches, not to just build new robots but to design soft, movable artwork.
Electriflow takes advantage of several different pouch shapes to create origami-like folds in flat plastic sheets. And it’s fast: Purnendu’s insects can beat their wings at a top speed of about 25 beats per second—quicker than most real butterflies and on par with some speedier moths.
“This system is very close to what we see in nature,” he said. “We’re pushing the boundaries of how humans and machines can interact.”
The researcher said he hopes more artists and designers will use the tools he and his team developed to push those boundaries even farther. He imagines that one day, you might see origami animals that can fold themselves into various shapes from a flat sheet of plastic or cartoon characters that run and jump in the pages of books.
“There are a lot of different geometries that we can play with,” Purnendu said.
For now, he’s happy to watch his butterflies take flight.
Christoph Keplinger, now at the Max Planck Institute for Intelligent Systems in Germany, was a coauthor of the new study. Other coauthors at CU Boulder include Sasha Novack, graduate student in ATLAS; Mirela Alistar and Daniel Leithinger, assistant professors in ATLAS and the Department of Computer Science; Carson Bruns, assistant professor in ATLAS and mechanical engineering; and Mark Gross, director of ATLAS and professor of computer science.