
Research
My research goals are broadly to lead technology development necessary to increase the pace of exploration and exploitation of our solar system. In other words, I want to enable faster, more efficient systems in space that will produce more scientific knowledge, increase economic production, and increase the human population living and working in space. A key area of technology that must be advanced to this end is autonomy.
My lab, the Orbital Research Cluster for Celestial Applications (ORCCA), is actively working to advance the state-of-the-art in autonomy for spacecraft (and space robotics) applications. Our work focuses on exploiting the unique dynamics of various environments to build robust autonomous guidance, navigation and control (GNC) algorithms. In trying to fully understand the environment on and around various planetary bodies in order to model and exploit what is known (and to properly deal with what is unknown), we regularly cross the border between engineering and planetary science.
Current Student Research
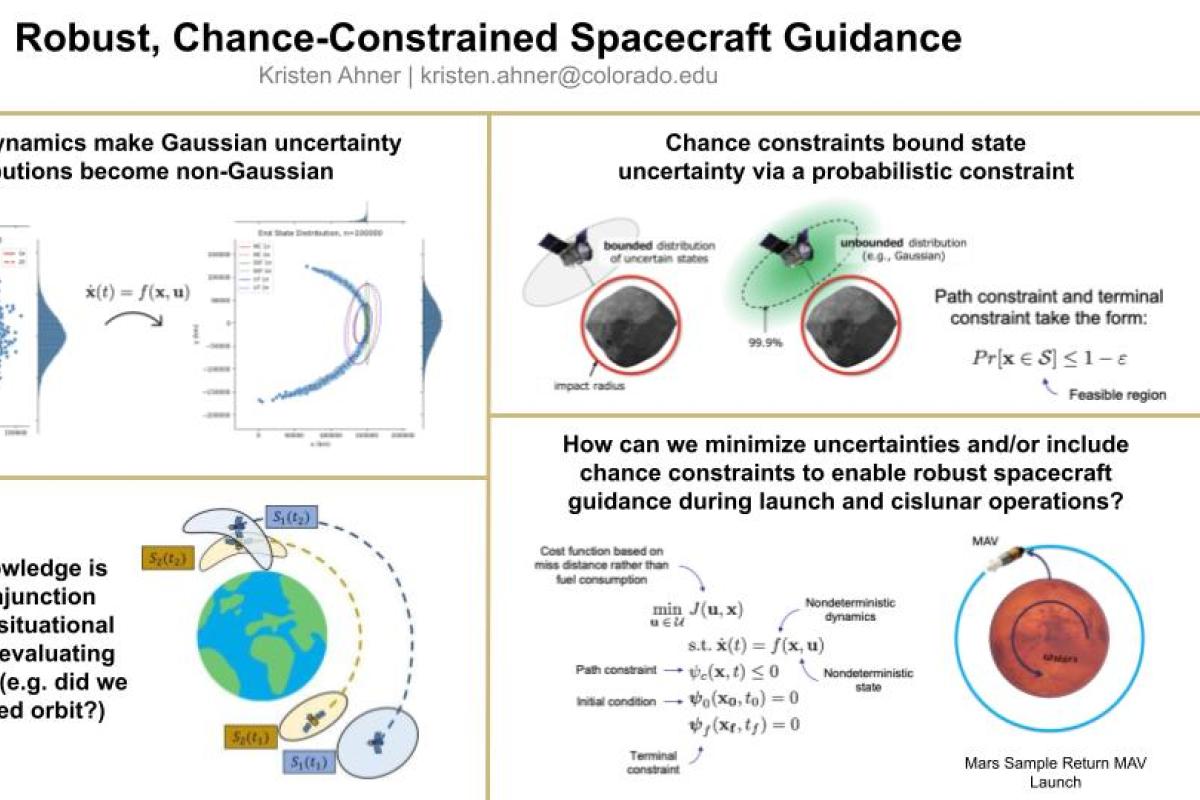
As complex, nonlinear system dynamics cause errors to grow over time and drive a spacecraft to deviate from its orbit and planned maneuvers, corrective guidance algorithms must adaptively re-optimize the spacecraft thrust maneuvers to reach target states and achieve mission goals. This research advances state-of-the-art guidance by combining stochastic control approaches to uncertainty with non-Gaussian chance constraints while incorporating thrust maneuver errors.
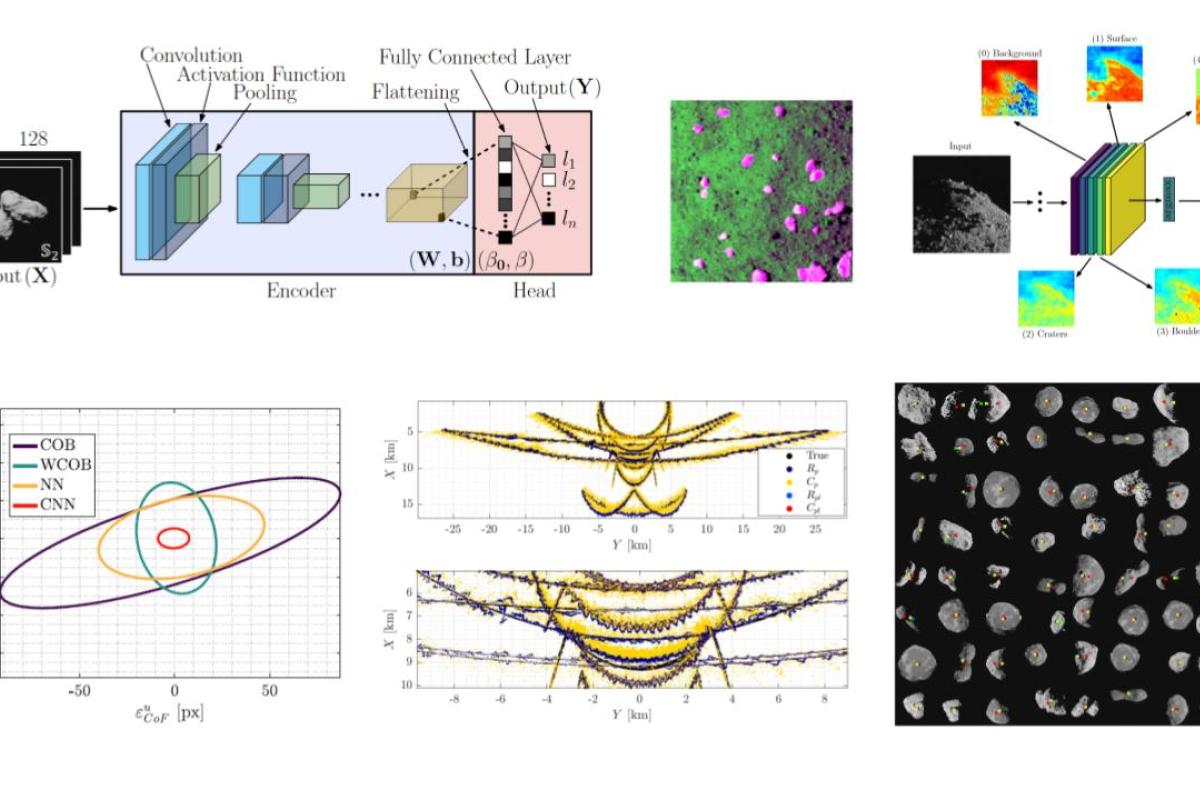
Navigating small irregular bodies such as asteroids and comets is challenging for different reasons: rapidly changing illumination conditions, various and irregular morphological features, and a highly non-linear environment riddled with uncertainties. This research is focused on different aspects involved when navigating a spacecraft, both autonomously and with aid from the ground. The former is investigated using data-driven image processing algorithms and machine learning methods, which enable intelligence capabilities for onboard applications.
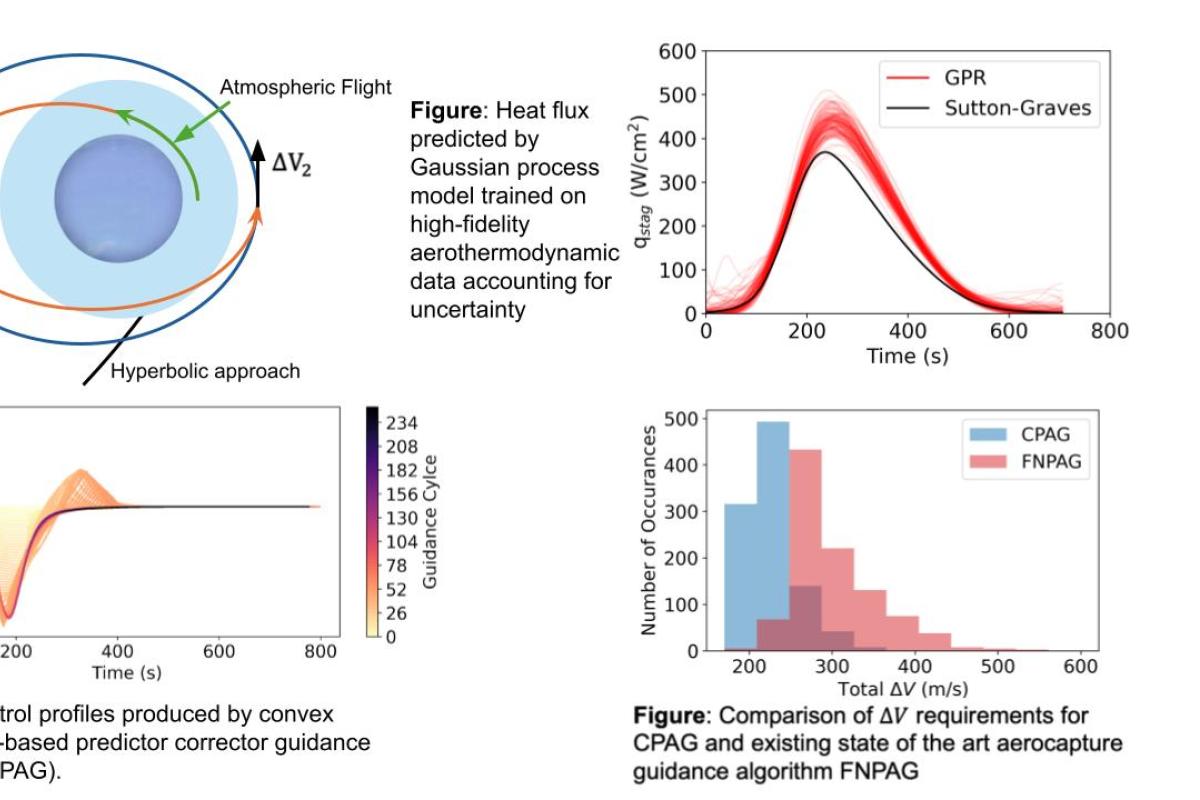
The aerodynamic heating environment of an aerocapture vehicle is intrinsically coupled with its trajectory and is a key metric in vehicle design. Developing advanced guidance algorithms that are aware of the aerothermodynamic environment and its uncertainty could produce more robust and optimal system designs. This work aims to leverage advanced optimization and surrogate modeling techniques to directly integrate key aerothermodynamic phenomena into an aerocapture guidance algorithm.
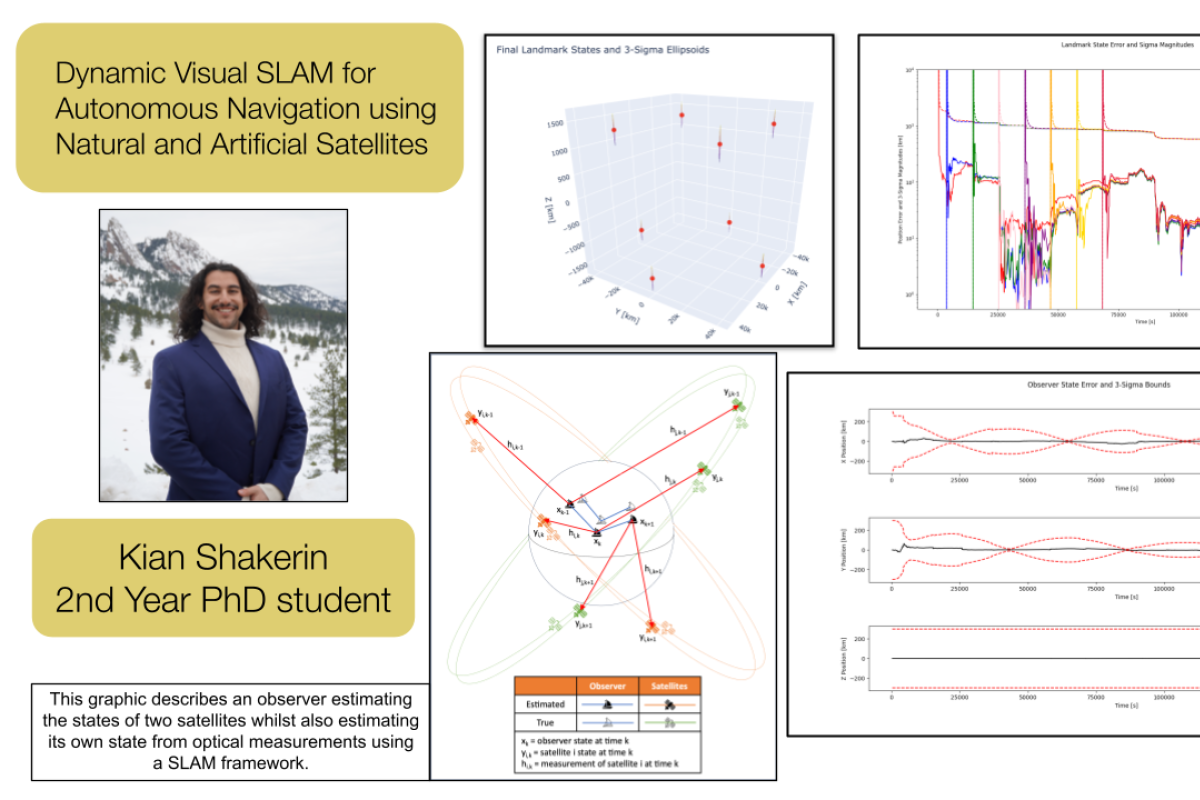
My research is focused on Visual Simultaneous Localization and Mapping with dynamic landmarks (Dynamic VSLAM) for autonomous navigation using natural and artificial satellites.
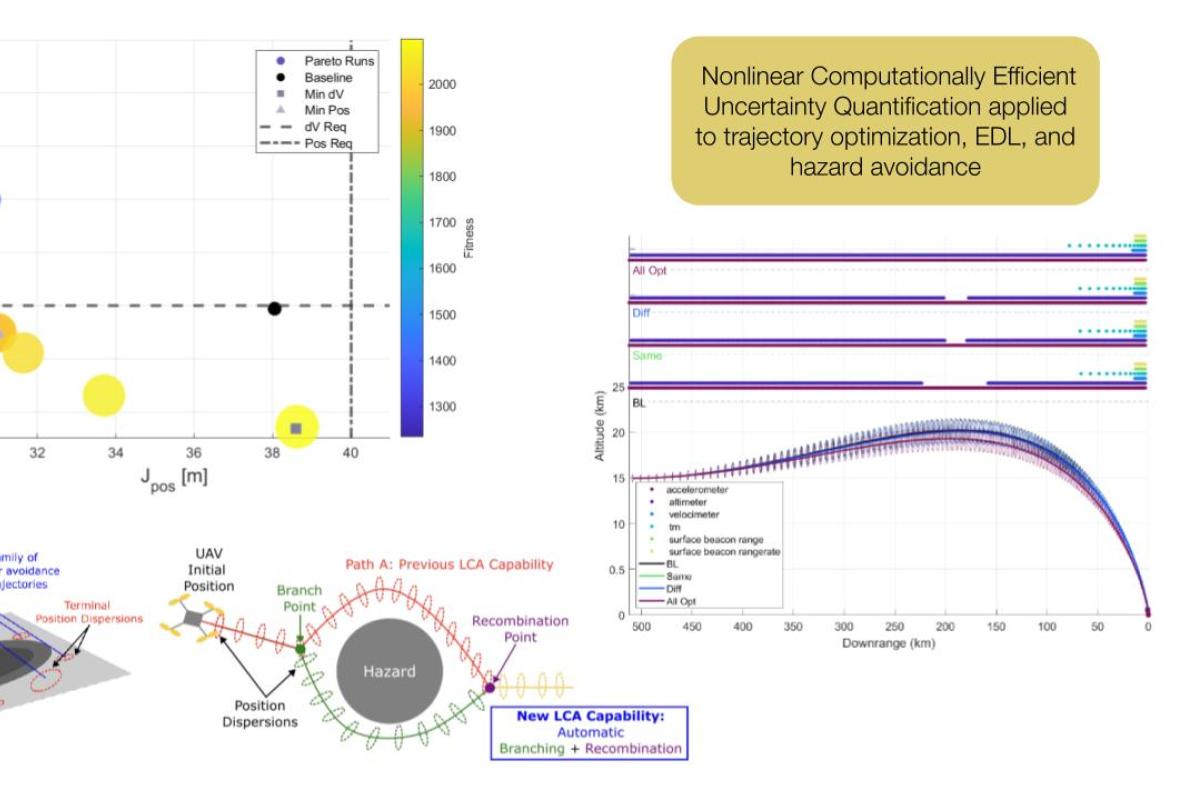
Uncertainty quantification (UQ) is pivotal for guidance, navigation, and control (GNC) in risky environments, such as aerocapture and hazard avoidance. Many state of the art UQ methods are computationally expensive or compromise on accuracy. My research aims to develop computationally efficient, nonlinear, non-Gaussian uncertainty propagation techniques that can be applied to these complex flight scenarios to improve GNC performance. This approach enables accurate and efficient stochastic guidance algorithms and nonlinear navigation schemes.
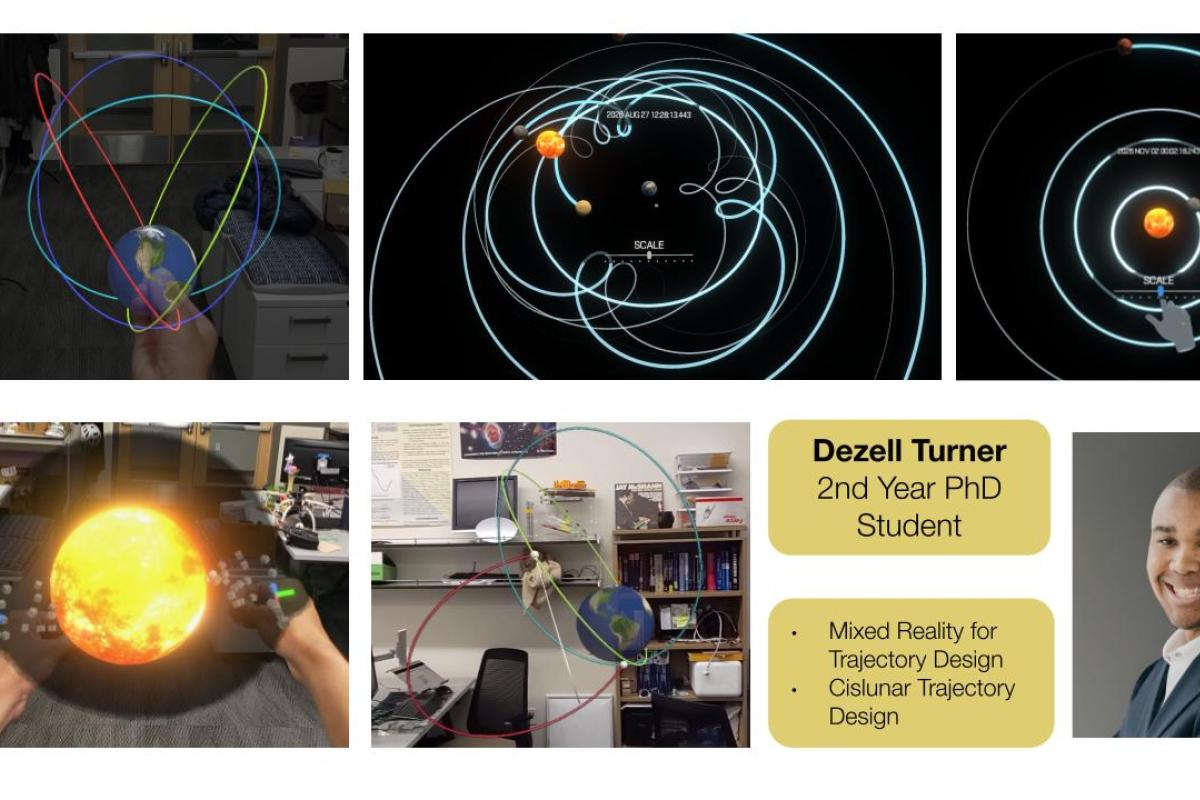
Augmented Reality for Intuitive Trajectory Design
Trajectory design in multibody systems, such as cislunar space, is an extremely complex task due to their highly nonlinear dynamics. As a result, many state-of-the-art multibody trajectory design tools are prohibitively difficult for non-expert users. To make trajectory design more intuitive, we are designing an augmented reality tool that allows non-expert users to quickly design trajectories and perform trade studies.
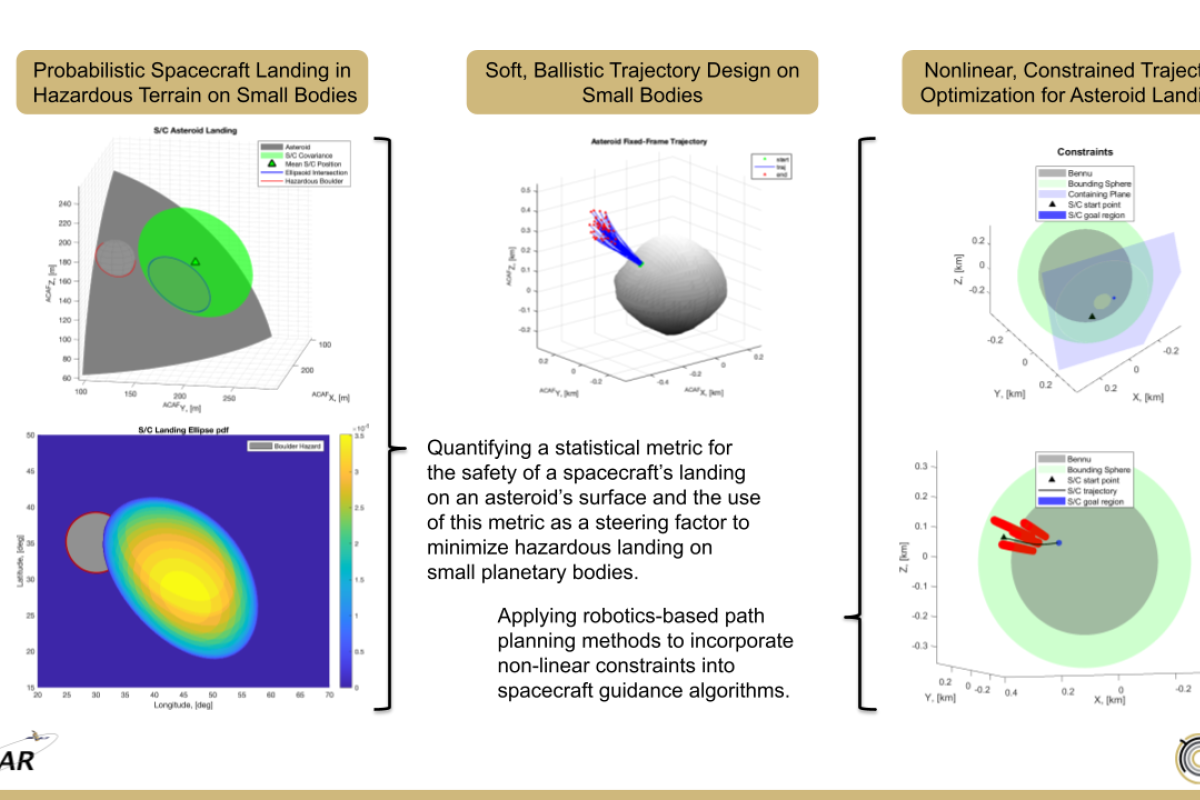
My research goal is to further enable the exploration of small planetary bodies, such as asteroids and comets, to expand our understanding of the cosmos. Specifically, I am interested in developing safe and robust methods for landing on these small bodies. This includes the incorporation of uncertainty, hazard awareness, and dynamic constraints into terminal landing phase guidance.
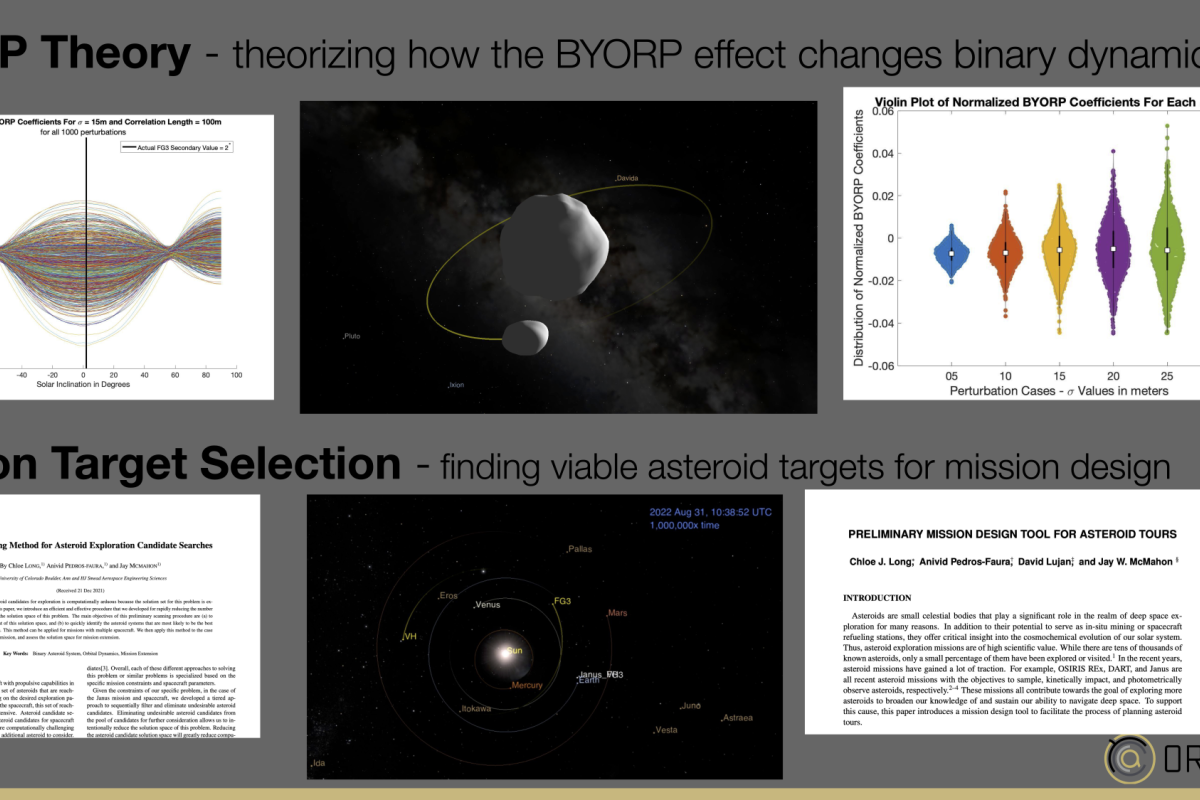
BYORP theory and asteroid target selection
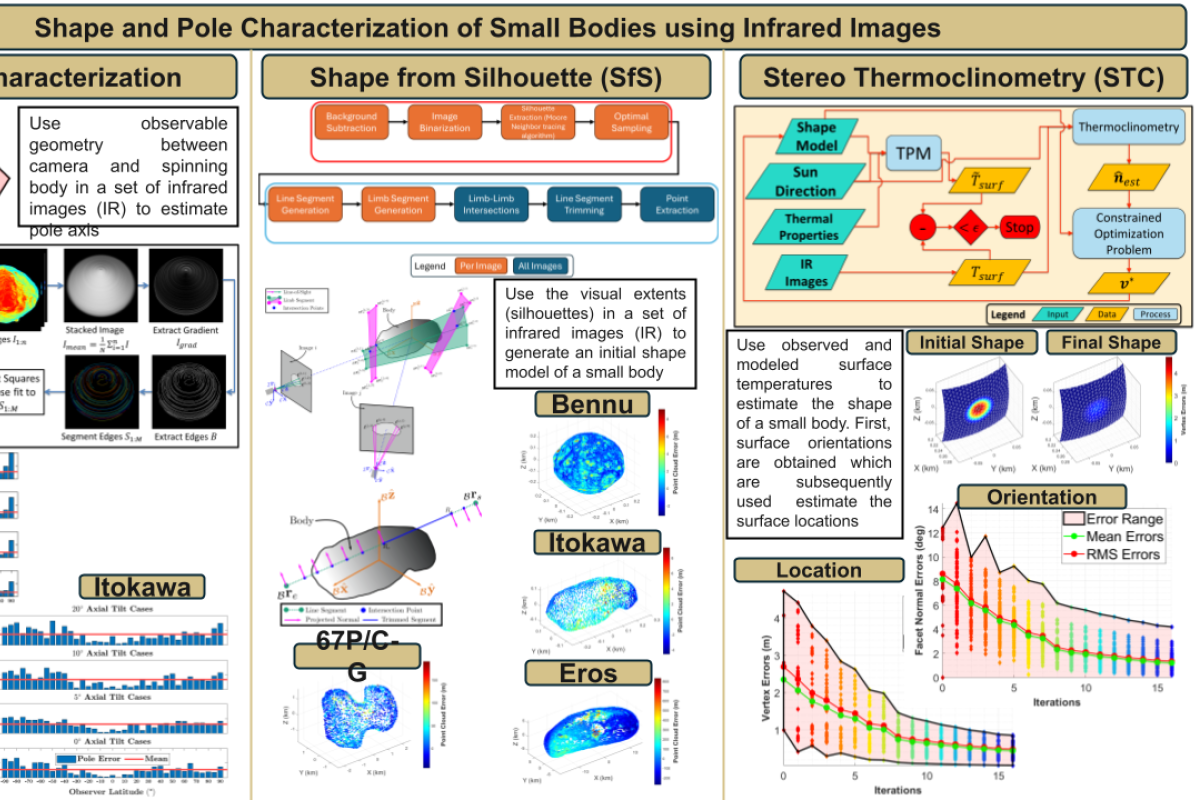
This research utilizes infrared images (IR) to robustly estimate the shape and pole axis of a small body which are vital for proximity operations. The first part of the research developed an algorithm to estimate the pole axis from a set of on-board IR images. In the second part of the research, a robust image processing pipeline was developed to extract visual extents (silhouettes) of the body from IR images. A Shape from Silhouette (SfS) algorithm, based on previous work in ORCCA, was developed to obtain a shape model using these silhouettes. The third contribution, Stereo Thermoclinometry (STC), aims to refine an initial shape model using IR images to more accurately capture the small body shape. STC works in two sequential steps: (1) use differences in predicted and measured temperatures to estimate the surface orientations, (2) obtain the corresponding shape model vertices that best fit the estimated orientations. These two steps are iterated until convergence.

This research focuses on the secular dynamical evolution of binary asteroid systems. Specifically, we look at how phenomena like solar radiation pressure (i.e., the BYORP effect) and tidal interactions influence the coupled attitude and orbital evolution of these systems, and how shape variations and attitude perturbations can affect the resulting behavior.
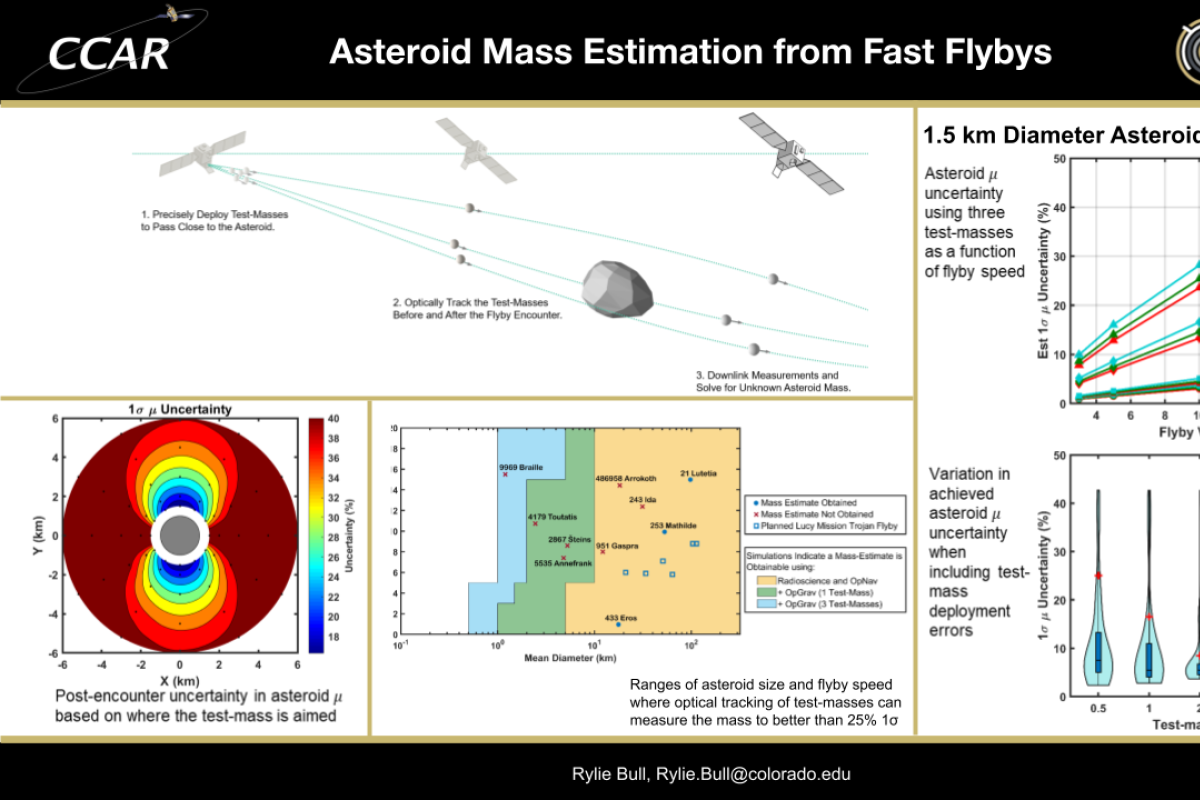
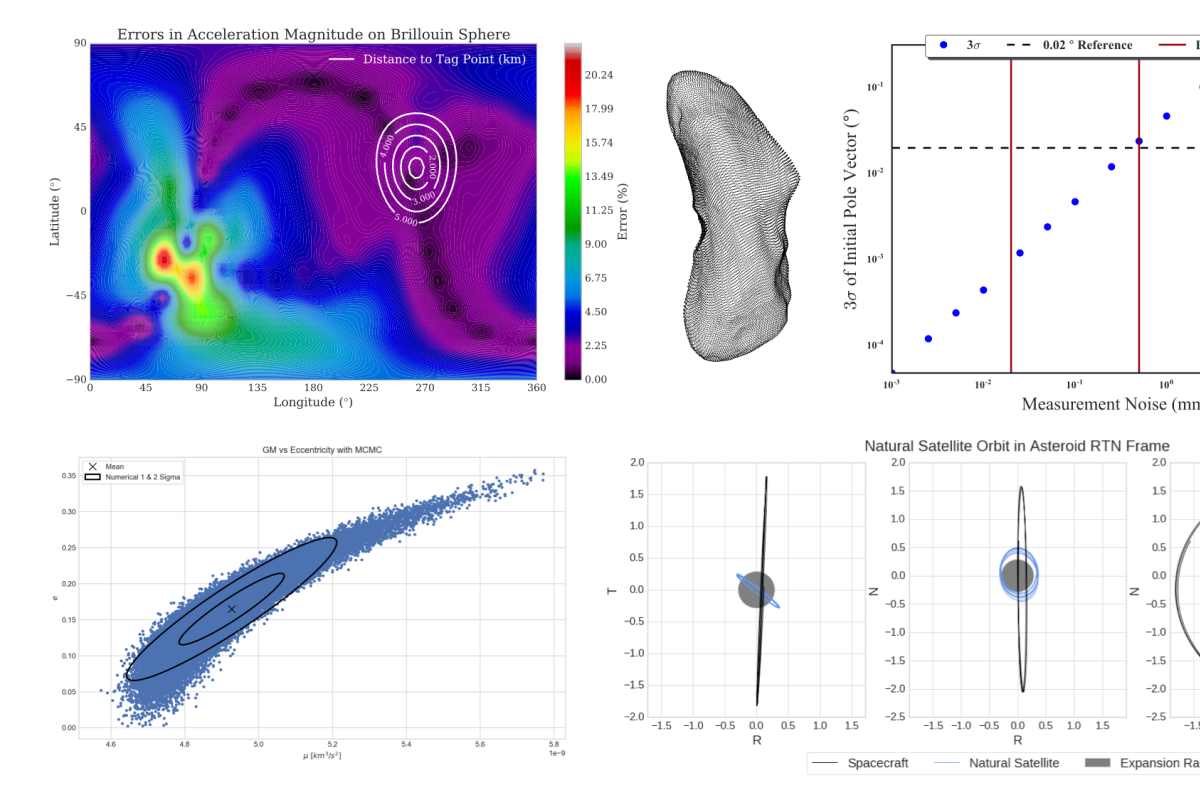
It is impossible to measure the mass of small asteroids from a high speed flyby of a spacecraft using traditional navigation techniques, because the spacecraft's trajectory is very weakly perturbed by the asteroid's gravity. This research examines novel methods to overcome these limitations, by tracking artificial or naturally occurring test-masses in short duration encounters. By tracking test-masses that are much closer to the asteroid, it is possible to estimate the asteroid's mass even for fast flybys of small asteroids.
Former Students' Research at ORCCA

Relative Dynamics Control using Lyapunov Theory
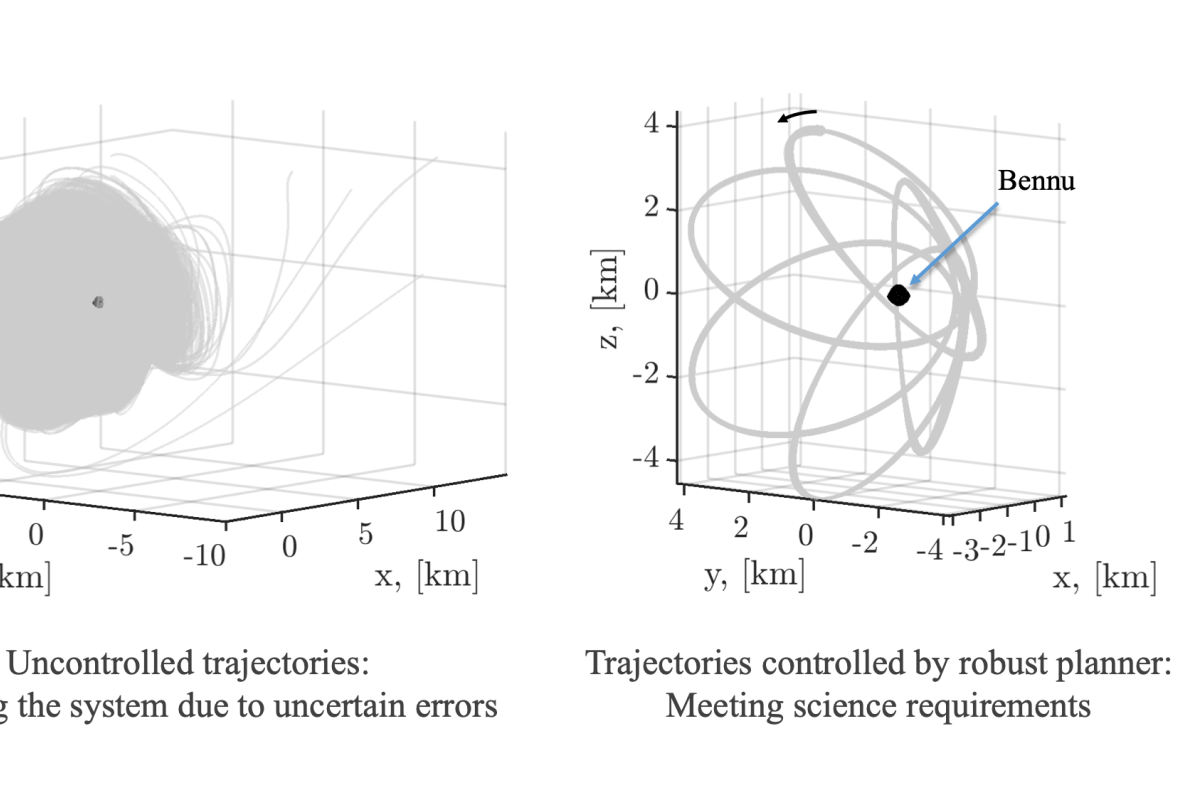
Around asteroids, mission designers need to plan robust guidance and control of spacecraft orbits to meet operational requirements (e.g., science requirements) under complex, uncertain dynamical environments. We develop a robust guidance planner that minimizes the control effort while ensuring the requirement satisfaction with a user-defined confidence level.

Drag-modulation offers a straightforward solution to aerocapture (top left) guidance, leveraging vehicle geometric properties for trajectory control. (bottom left & top right) Jettisoning a rigid drag-skirt during the trajectory enables the guidance system to target a desired exit state. Investigations into multiple jettison events (bottom right) show promising improvements in aerocapture robustness and accuracy.

This research focuses on the development of an autonomous spacecraft guidance system to enable to use of low-thrust propulsion around small bodies. The ALT-G architecture is able to autonomously plan and execute finite, continuous low-thrust maneuvers between two orbits using a parametric bilinear tangent (BLT) guidance law and a predictor-corrector guidance scheme. The figures the slide show examples of the planning and guidance capabilities of low-thrust BLT using ALT-G.
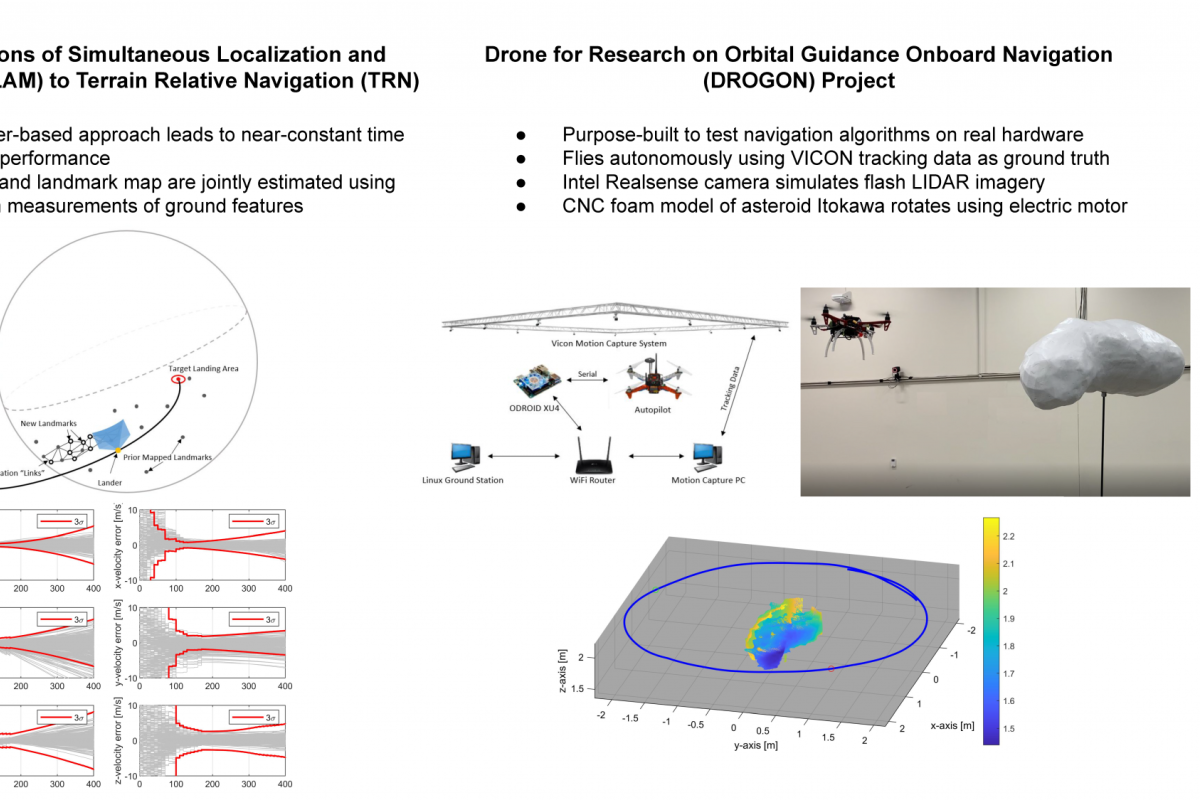
On the left, this research investigates using methods from simultaneous localization and mapping for terrain relative navigation at small bodies and moons. On the right, we have a description of our quadrotor based testbed for navigation algorithms around small bodies, which we run in ASPEN Flight Lab in the Aerospace Engineering building at CU.

Low-resolution mapping methods aid in the onboard processing of shape models for the purpose of proximity navigation when encountering and exploring small bodies. Our approach focuses on the optical data sources, taking limb and terminator information into account while building a visual hull. The aim of this work is to use computer vision approaches to enable shape modeling for SIMPLEx-level missions.
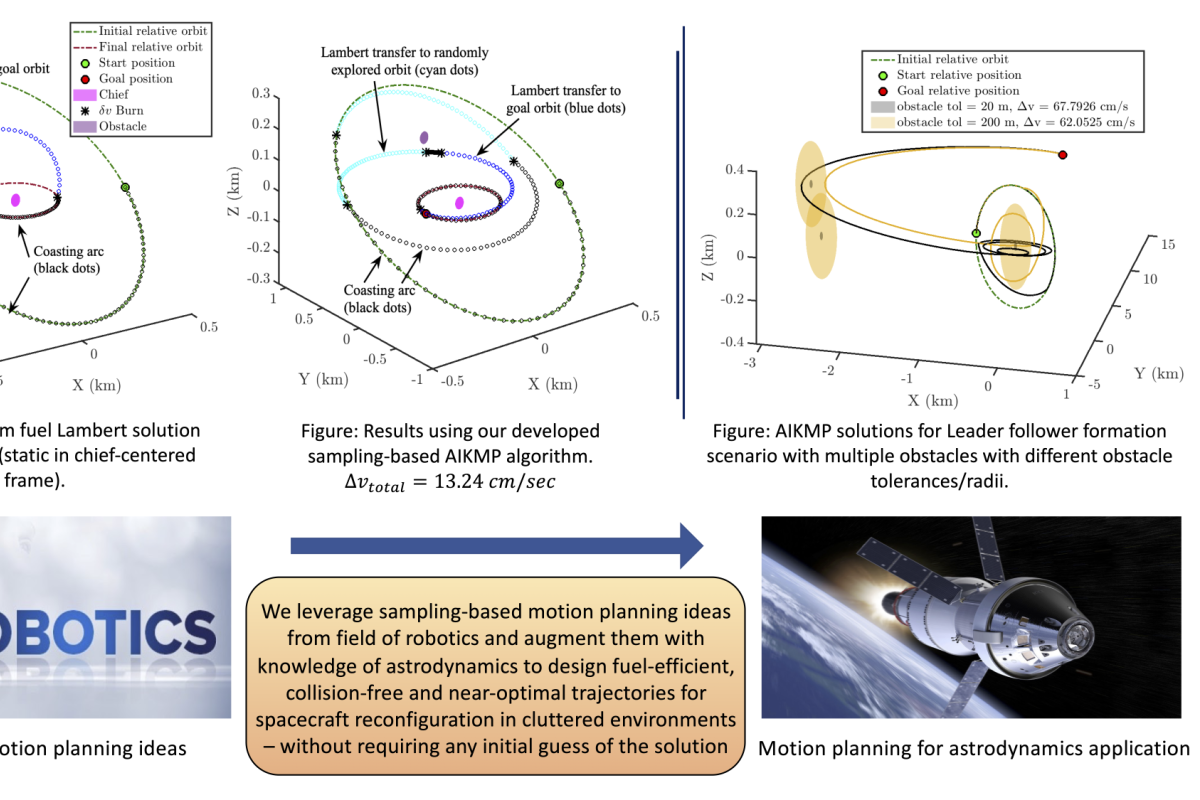
Spacecraft formation flying is inherently very risky as multiple spacecraft need to operate in proximity with each other. There is an immense need for fast and efficient algorithms to compute safe, and collision-free relative trajectories for multi-spacecraft systems. At ORCCA, we leverage ideas from sampling-based motion planning in field of robotics and develop motion planning algorithms to achieve fuel-efficient, collision-free, and near-optimal trajectories for spacecraft reconfiguration in cluttered environments.
Precise Orbit Determination During Near-Surface Proximity Operations Around Small Bodies

Multi-Objective Multi-Spacecraft Interplanetary Global Trajectory Optimization
Recent asteroid missions have shown that asteroid surfaces are endure different processes that shape and reshape the asteroid both globally and locally. Daniel's research seeks to describe the relationship between an asteroid's rotation and the processes on its surface. Using the Surface phenomena Effect on Asteroid Rotational And Translational State (SEA-RATS) tool developed at ORCCA Daniel investigates the conditions for surface activity such as boulder motion and quantifies their effect on asteroid rotation.
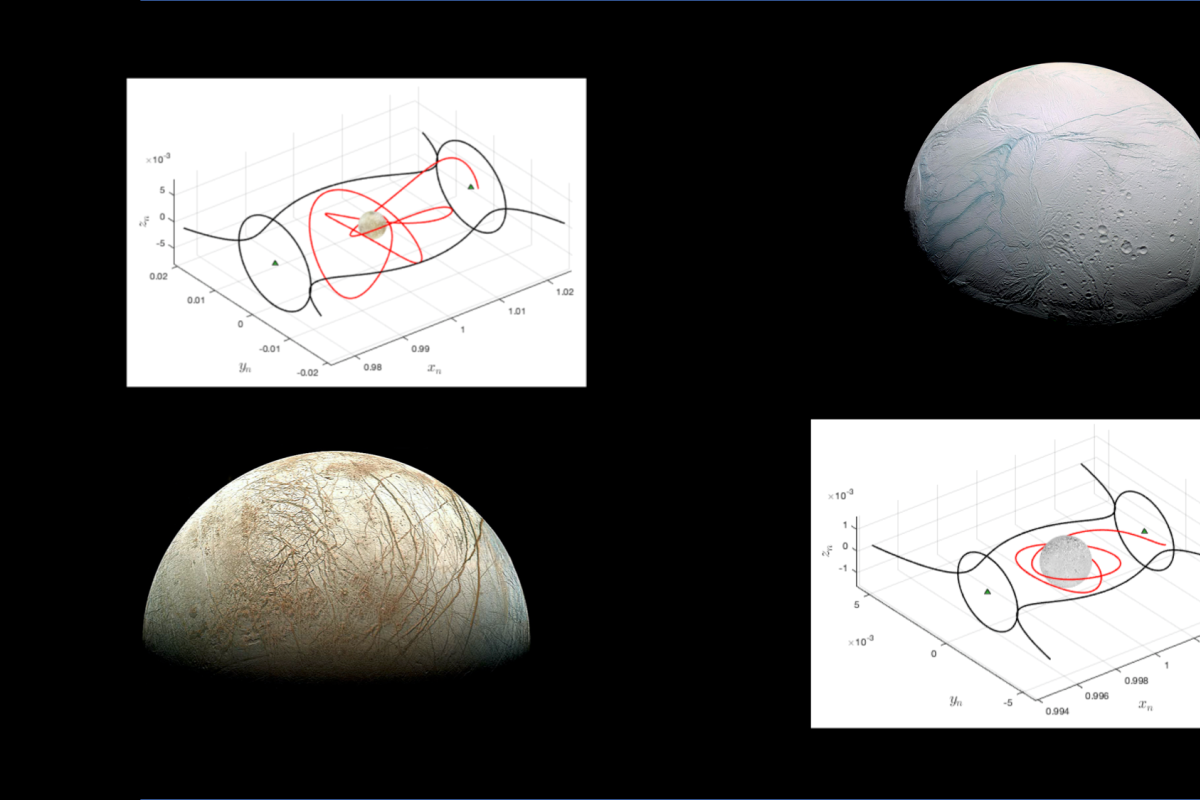
Analysis of Low-Energy Landing Trajectories for Moons of the Outer Planet
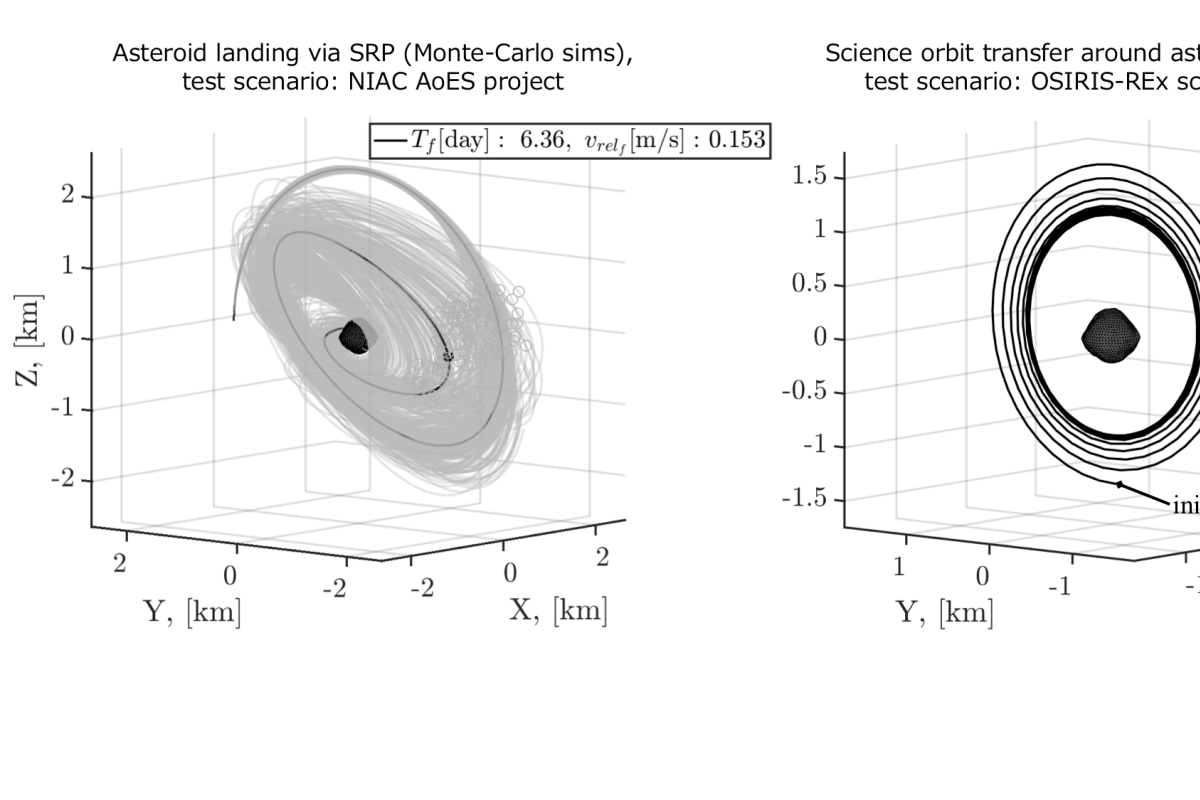
Solar Radiation Pressure (SRP) is a ubiquitous force that acts on any objects in space. We can exploit the force to control spacecraft orbits without consuming fuel. We analytically derived an optimal orbit control law for the "SRP-based orbit control" and demonstrated it with some small body exploration scenarios, including asteroid landing (left) and science orbit transfer (right) scenarios.
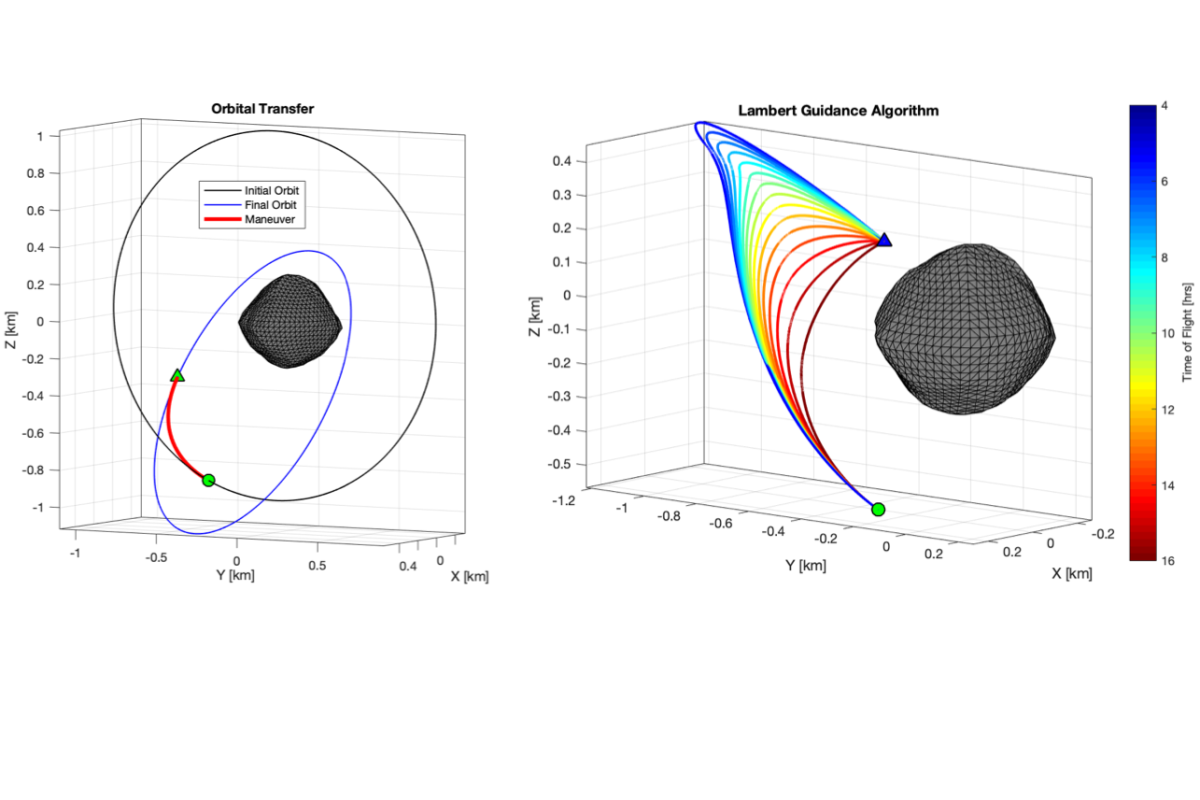
(Left) Shows an orbital maneuver accomplished using a bi-linear tangent guidance algorithm. This maneuver, which is aggressive in both changing the shape and plane of the original orbit, was accomplished for only a few grams of fuel. (Right) Shows a family of Lambert guidance solutions when time-of-flight is varied.

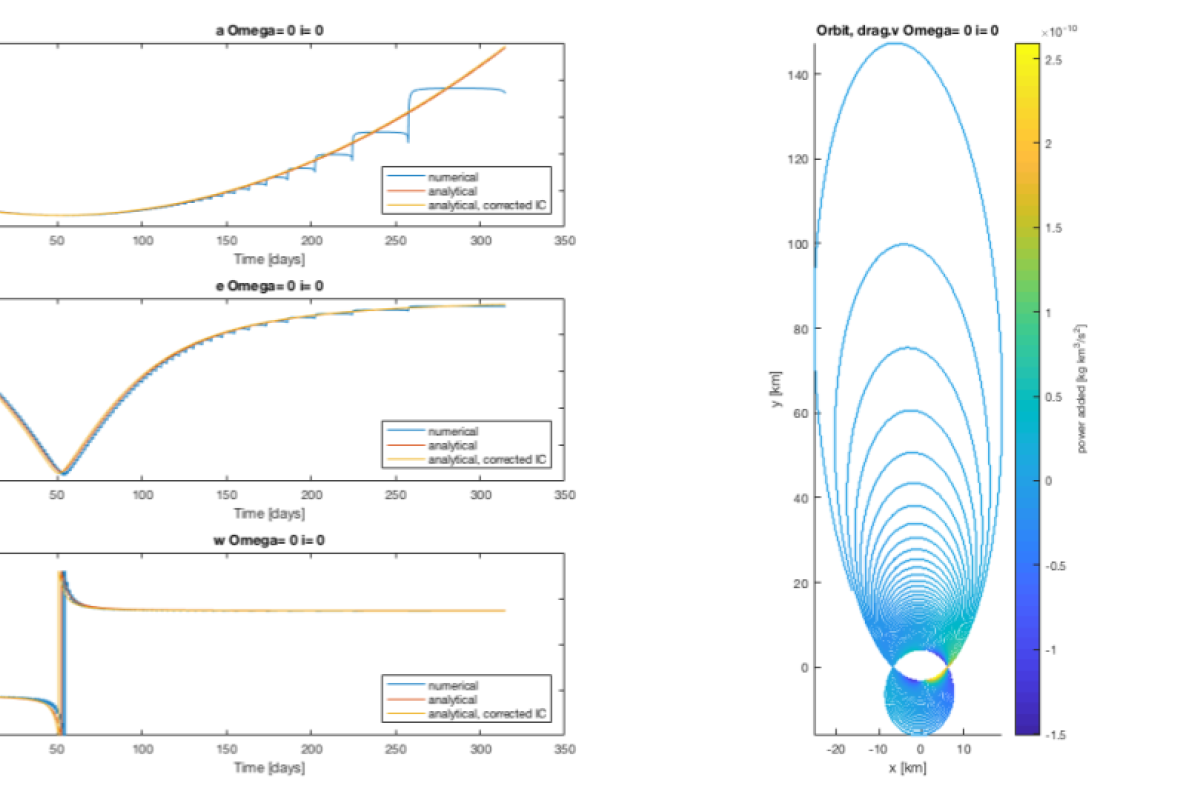
(Left) Shows a ballistic trajectory propagated around Bennu with full dynamics over a period of 15 Earth days. At close distances, the gravity field of Bennu plays an import role in the evolution of orbits. (Right) Shows the results of a low-thrust orbital maneuver with uncorrected error components. As the figure shows, without active guidance the resulting trajectories vary substantially.
Mark studies how the gasses streaming off active comets perturb the motion of spacecraft or natural objects orbiting the comet. He is interested in how these natural forces can be leveraged for spacecraft operations, improving science return, and for studying natural processes at comets.
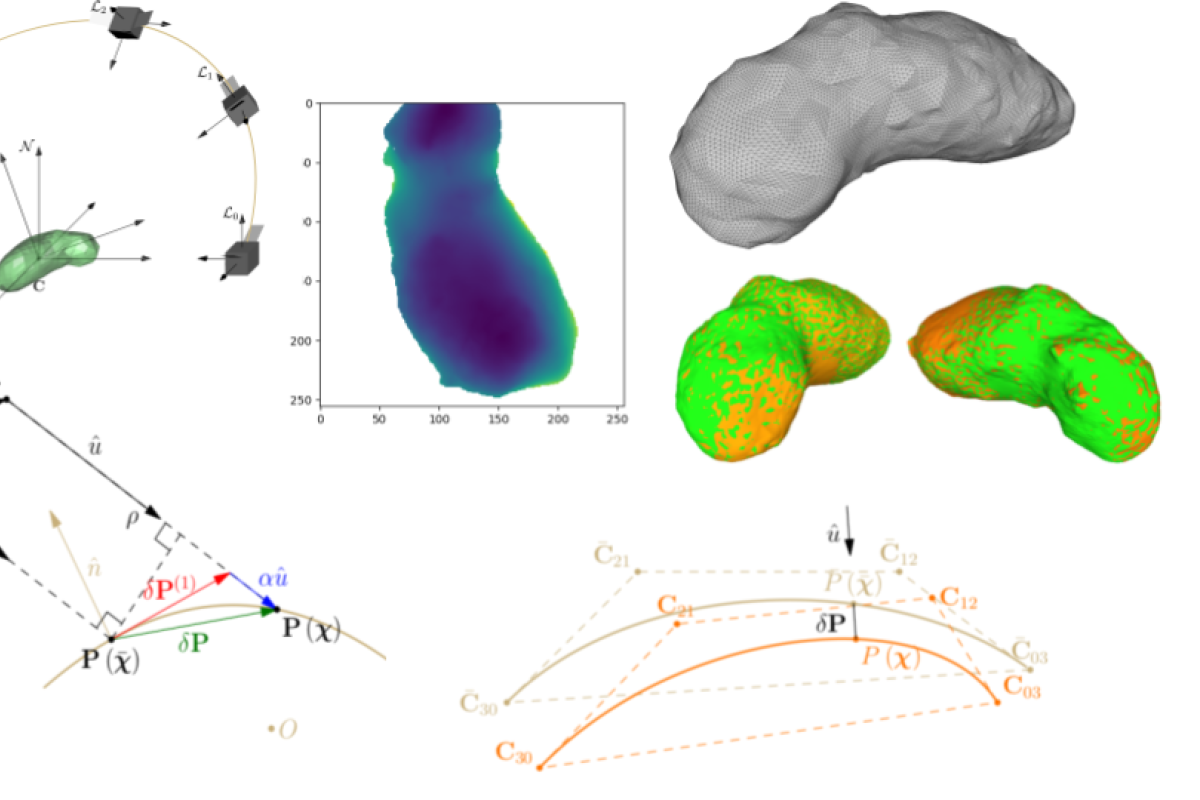
The reconstruction and mapping of small bodies by means of Lidar data requires proper handling of the underlying uncertainties in the reconstructed map, as well as a guaranteed robustness to the lack of a-priori information in the targeted small body’s shape and dynamical environment. This research aims at providing such a robust framework allowing successive observation, shape reconstruction and navigation of an unknown asteroid or comet.
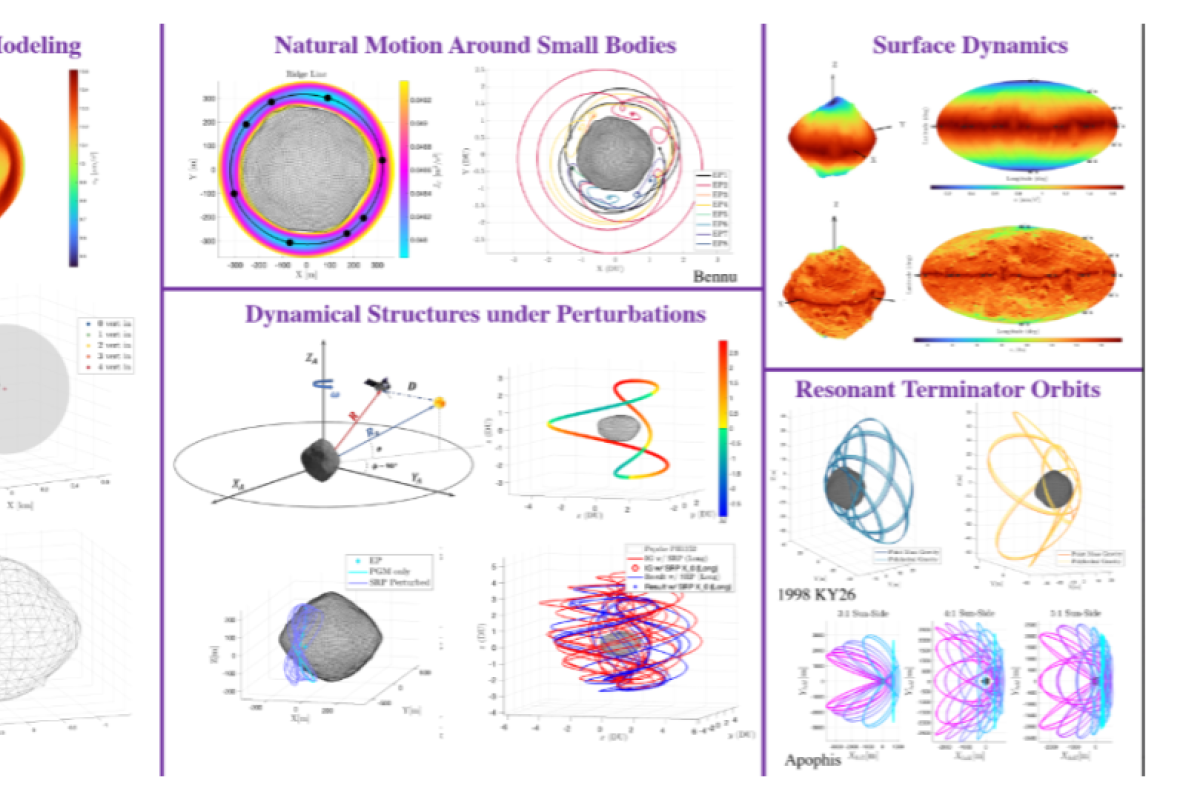
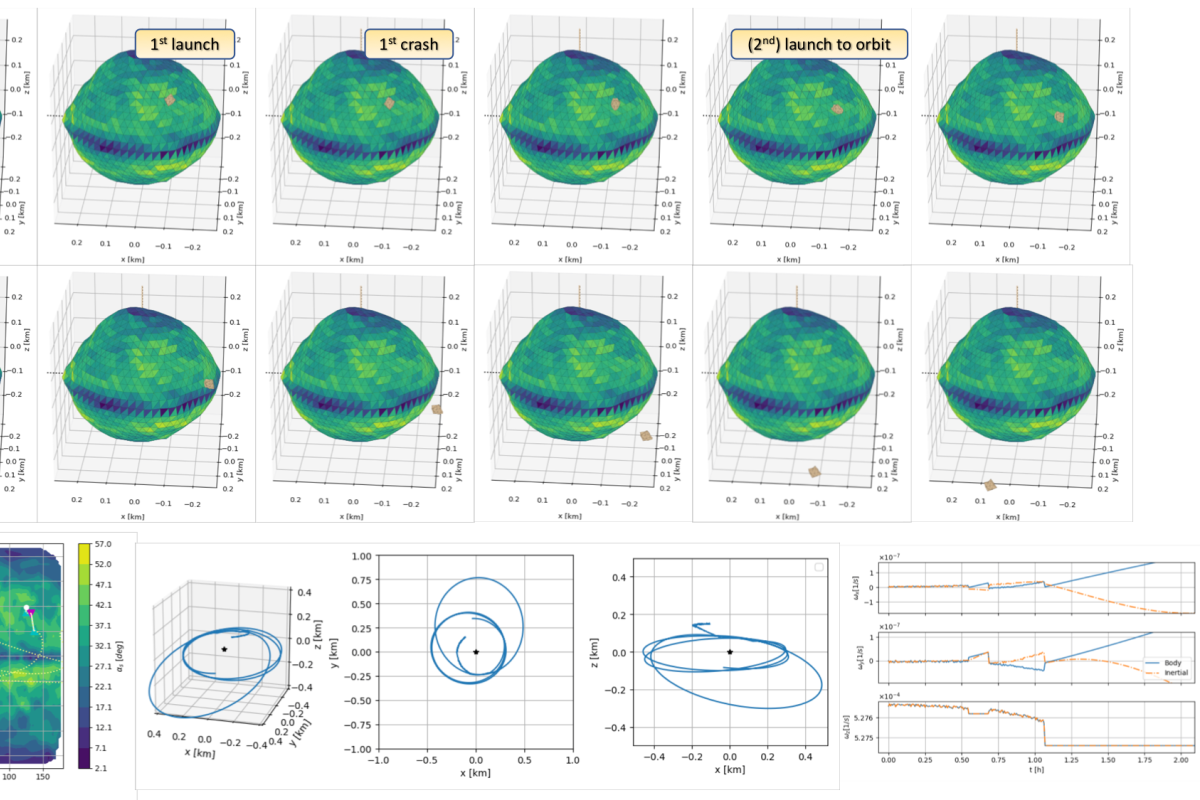
My research focuses on the dynamical environment of small bodies and understanding natural motion in their vicinity using high precision gravitational models. Specifically, I am interested in gravity modeling, robust guidance algorithms, and particle dynamics around small bodies. This work helps us identify orbits and locations in the vicinity of small bodies where ejecta or artificial objects can be placed strategically to maximize gravity measurements.