
mCLARI


A shape-morphing insect-scale robot capable of omnidirectional terrain-adaptive locomotion in laterally confined spaces
[IROS Best Paper Award on Safety, Security, and Rescue Robotics]
Paper link: https://doi.org/10.1109/IROS55552.2023.10341588
CU Press Coverage: https://www.colorado.edu/mechanical/2023/10/31/jayaram-and-team-win-iros-best-paper-award-safety-security-and-rescue-robotics
For journalist and media personnel: We are excited to work with you, please write to Kaushik Jayaram kaushik.jayaram@colorado.edu to discuss your interest.
For high quality media footage of the robot please use the files uploaded here: mCLARI media files All photos and videos were taken by Heiko Kabutz.
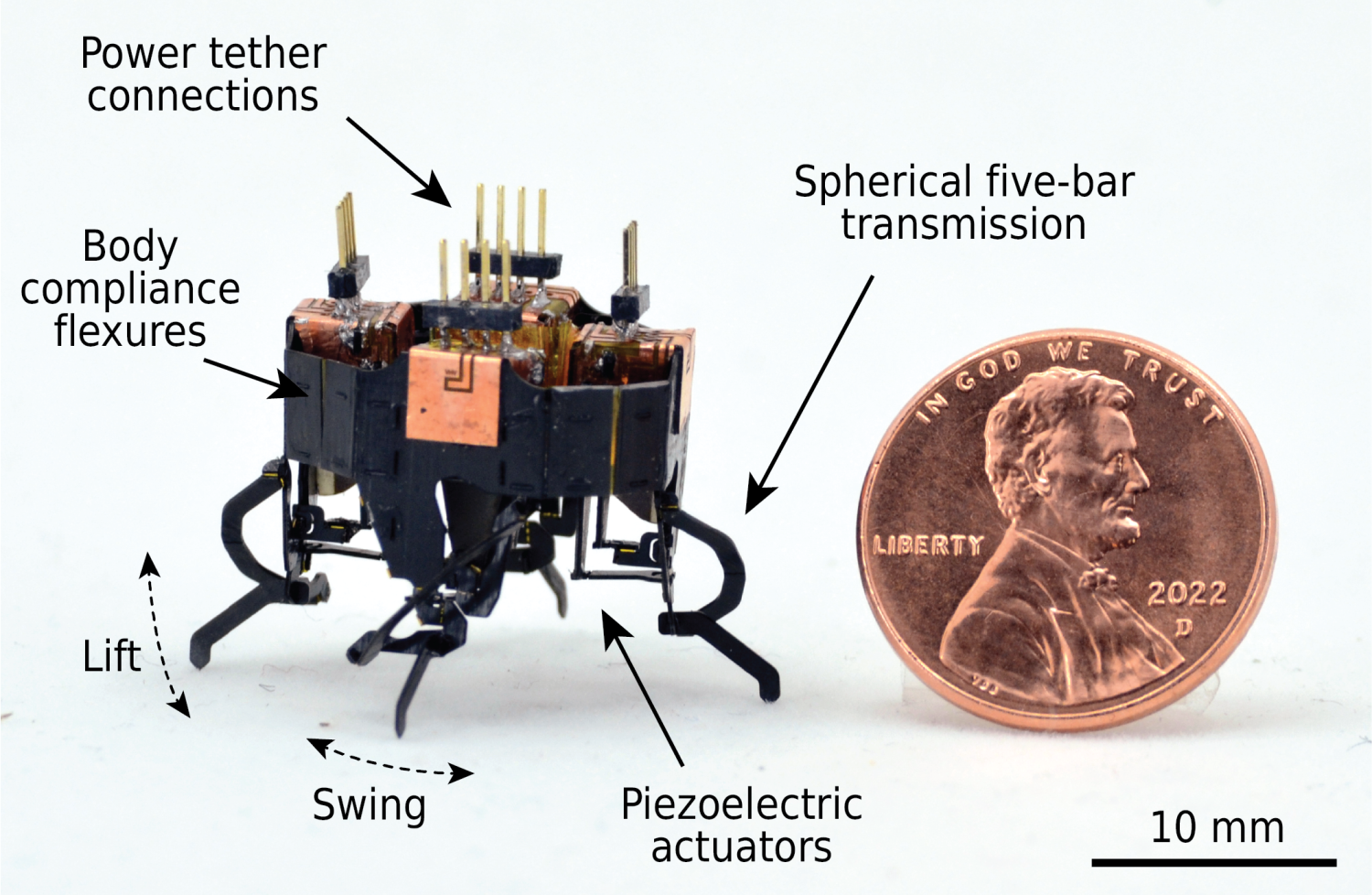
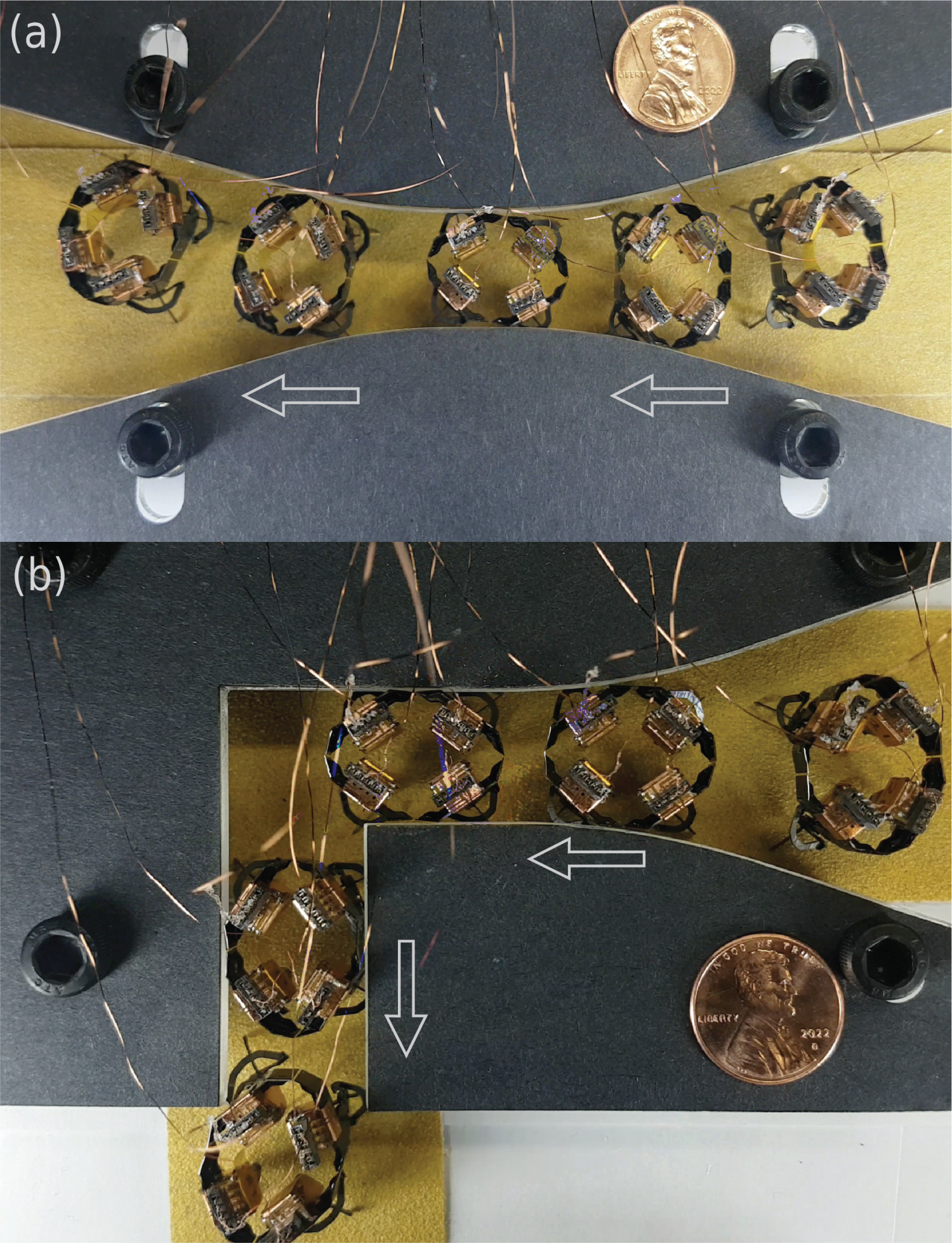
Soft compliant microrobots have the potential to deliver significant societal impact when deployed in applications such as search and rescue. In this research we present mCLARI, a body compliant quadrupedal microrobot of 20mm neutral body length and 0.97g, improving on its larger predecessor, CLARI. This robot has four independently actuated leg modules with 2 degrees of freedom, each driven by piezoelectric actuators. The legs are interconnected in a closed kinematic chain via passive body joints, enabling passive body compliance for shape adaptation to external constraints. Despite scaling its larger predecessor down to 60 % in length and 38% in mass, mCLARI maintains 80% of the actuation power to achieve high agility. Additionally, we demonstrate the new capability of passively shape-morphing mCLARI – omnidirectional laterally confined locomotion – and experimentally quantify its running performance achieving a new unconstrained top speed of ∼3 bodylengths/s (60 mms−1 ). Leveraging passive body compliance, mCLARI can navigate through narrow spaces with a body compression ratio of up to 1.5× the neutral body shape.