
Research
Even today's best robots are considered 'fragile' for real-world utilization. They break easily - sometimes simply colliding into an obstacle in their environment. Once damaged, robots are often limited to pre-specified compensatory behavior and therefore, unable to recover adequately for continuing operation. In order to avoid such failure, they need to be able to sense internal states and environmental conditions. In contrast, animals are remarkably robust - can anticipate uncertainties to avoid fatal damage, tolerate construction flaws and rapidly adapt to changing environmental situations.
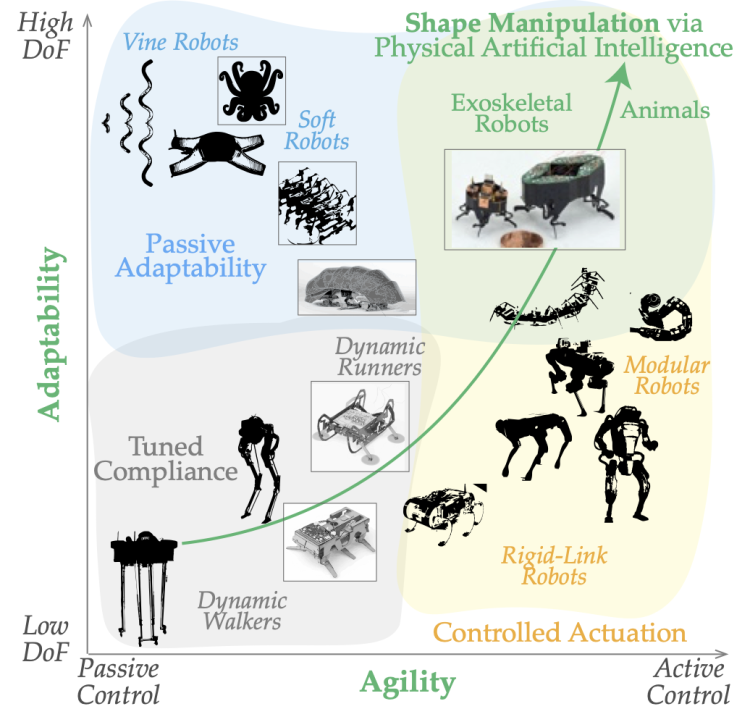
Two key aspects of robustness our group is addressing currently are adaptability and agility using shape-shifting as a bioinspired embodied intelligent mechanism. For our purposes, we use the term shape-shifting robots to refer to systems that actively change their shape to adapt to their environment or gain new functionalities. Although this definition does not divide robots into two mutually exclusive sets, it provides a framework to evaluate state-of-the-art paradigms critically with respect to system-level performance metrics of adaptability and agility because they serve as a measure of their readiness for real-world deployment. At one extreme are soft robots with high underactuated degrees of freedom (DoFs) that leverage morphological intelligence principles to demonstrate excellent passive shape morphing and adaptability to complex environments at various size scales. However, they are typically limited in agility due to the lack of integrated solutions for effectively tuning and controlling their shape. At the other extreme are multi-segmented rigid-link robots which use computational intelligence to actively control their DoFs and be remarkably agile in one or few environments, but find it difficult to match the adaptability of soft robots due to their limited DoFs. Furthermore, they tend to be physically large and their mechanisms of actuation, sensing, and control might not be possible to scale down effectively to size, weight, and power (SWaP) constrained systems. In between are modular, transformer, tensegrity, and swarm robots which trade-off adaptability with agility via controlled shape reconfiguration, but not as effectively as animals do. Towards bridging this performance gap, we propose that effective shape-shifting can be achieved by combining the adaptability-enabling high DoFs with the agility-enabling active control.
Past contributions from our group have involved understanding mechanisms of robustness during high-speed locomotion in cockroaches despite naturally occurring perturbations such as head-on collisions, body deformations and partial or complete amputations. More recently, we have been successful in integrating some of these principles of robustness of animal systems into robots at the scale of insects. We are currently working on expanding the capabilities of these robots by developing novel actuators, sensors and bioinspired appendage mechanisms.
Please see the pages to the right for details of individual projects. Check out the related YouTube channel and press coverage.
Interests
- Robustness
- Impacts & Collisions
- Appendage Loss & Damage
- Confined Locomotion
- Distributed Sensing