
Concomitant Sensing and Actuation
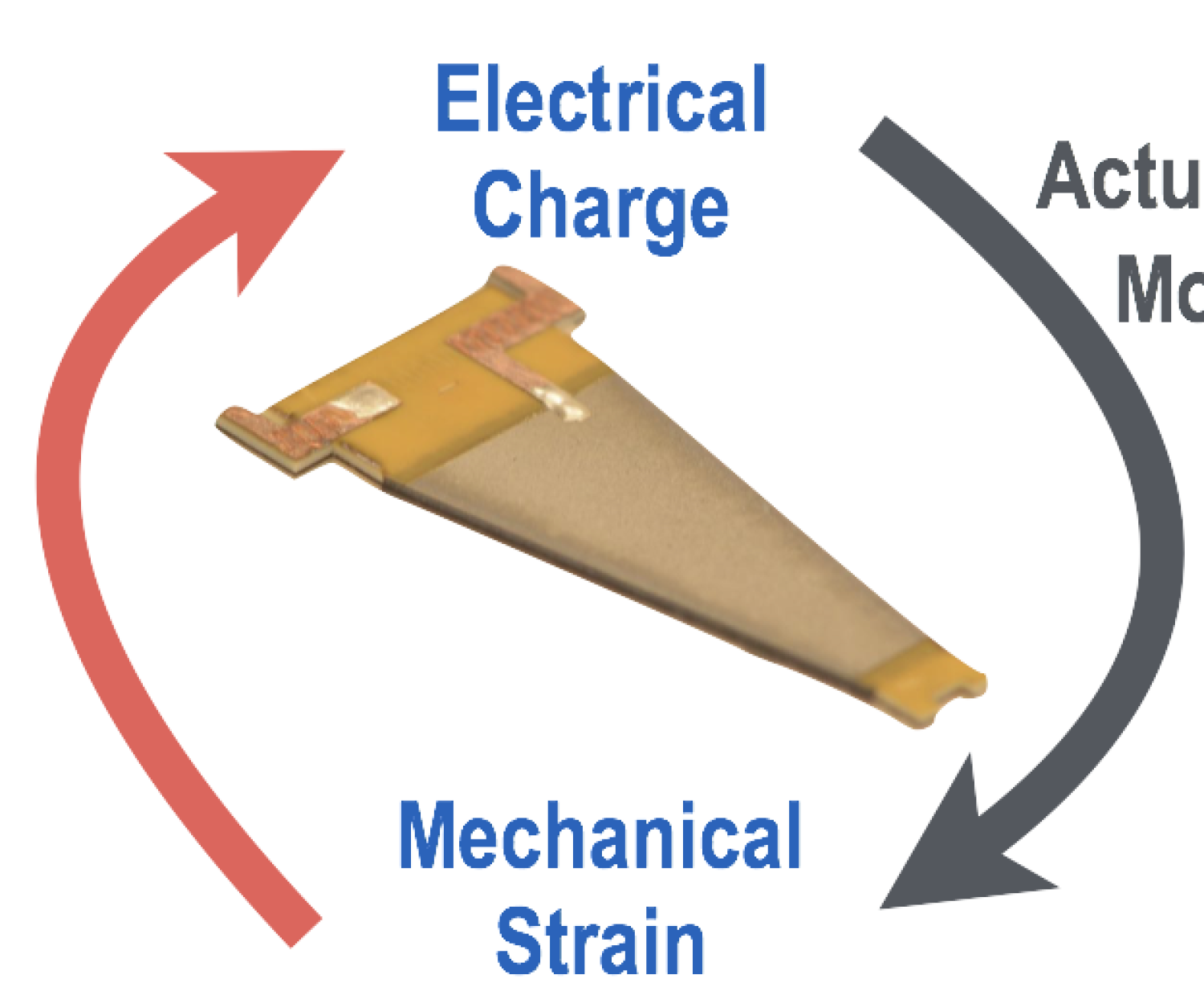
Principle of concomitivity.
Breaking News: Our work just got published as an article in SMS!
Sensor fabrication for microrobots is challenging due to their small size and low mass. As a potential solution, we present a technique for estimating the velocity of piezoelectric bending bimorph actuators, a popular choice for driving such microscale devices, that requires simple electronics and no additional mechanical components.
Our approach relies on the insight that motion of the actuators causes varying strains on the surface on the piezoelectric material, which via the direct piezoelectric effect, results in a current proportional to the actuator velocity. We propose that the actuator be electrically approximated as a parallel combination of a frequency and voltage dependent resistor and capacitor, and a velocity proportional current source. We develop an experimental procedure to measure these quantities, and are able to experimentally determine the actuator tip velocity to within 10% accuracy over a range of voltages (25–200 V) and frequencies (1–2000 Hz, well beyond actuator resonance).
We successfully apply this sensing methodology to two microrobots, the RoboBee and the Harvard Ambulatory MicroRobot (HAMR), to estimate the wing and limb motion respectively. We further use sensor feedback to close the loop on HAMR's leg phase and obtain desired leg trajectories near transmission resonance. The proposed sensor methodology is generic and can be applied to piezoelectric actuators of different geometries and configurations for uses in microrobotic applications.