
Surgical Endoscopy (2012): Surgical Evaluation of a Novel Tethered Robotic Capsule Endoscope using Micro-Patterned Treads
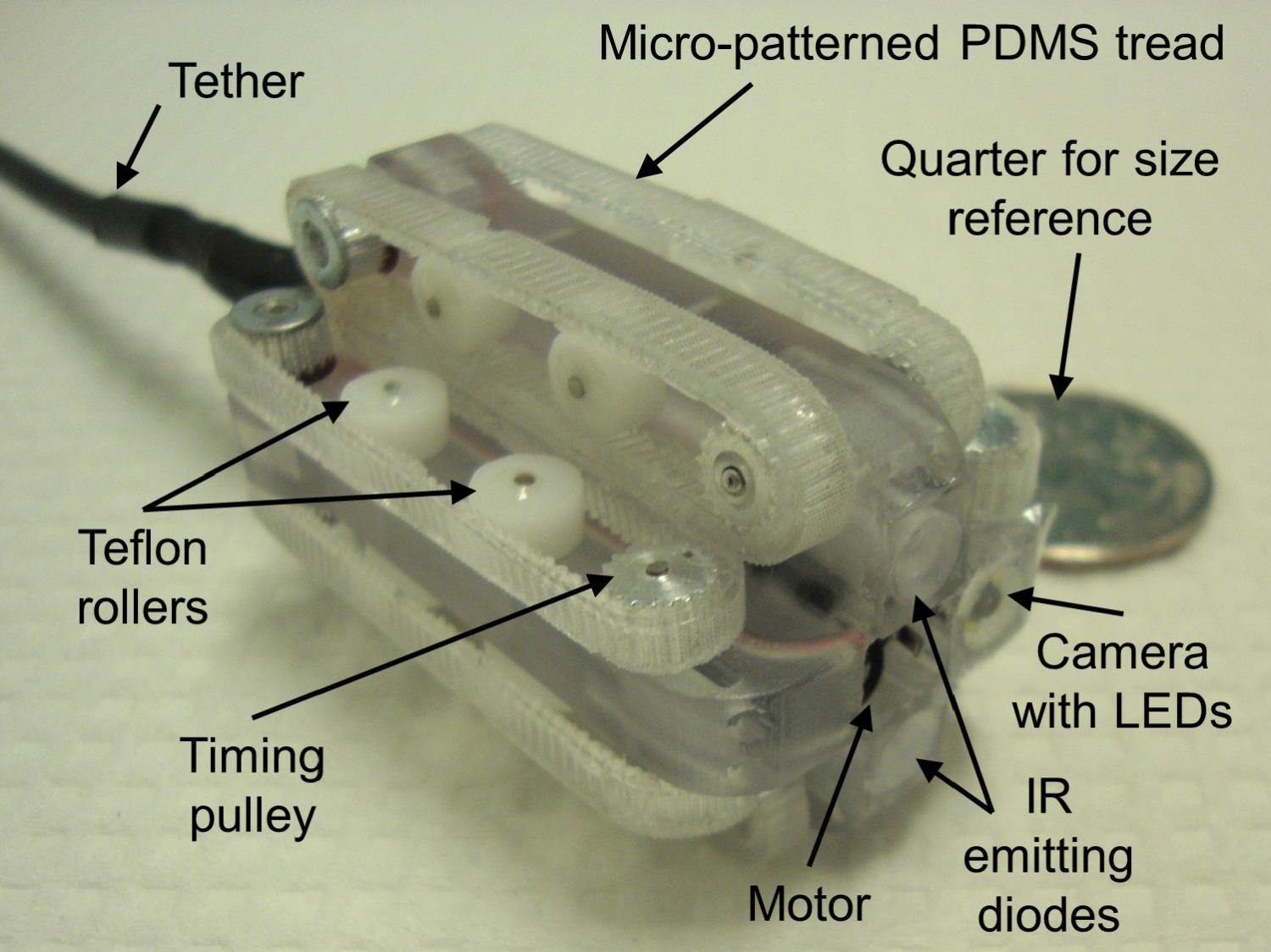
Abstract: The state-of-the-art technology for gastrointestinal (GI) tract exploration is a capsule endoscope (CE). Capsule endoscopes are pill-sized devices that provide visual feedback of the GI tract as they move passively through the patient. These passive devices could benefit from a mobility system enabling maneuverability and controllability. Potential benefits of a tethered robotic capsule endoscope (tRCE) include faster travel speeds, reaction force generation for biopsy, and decreased capsule retention. In this work, a tethered CE is developed with an active locomotion system for mobility within a collapsed lumen. Micro-patterned polydimethylsiloxane (PDMS) treads are implemented onto a custom capsule housing as a mobility method. The tRCE housing contains a direct current (DC) motor and gear train to drive the treads, a video camera for visual feedback, and two light sources (infrared and visible) for illumination. The device was placed within the insufflated abdomen of a live anesthetized pig to evaluate mobility performance on a planar tissue surface, as well as within the cecum to evaluate mobility performance in a collapsed lumen. The tRCE was capable of forward and reverse mobility for both planar and collapsed lumen tissue environments. Also, using an onboard visual system, the tRCE was capable of demonstrating visual feedback within an insufflated, anesthetized porcine abdomen. Proof-of-concept in vivo tRCE mobility using micro-patterned PDMS treads was shown. This suggests that a similar method could be implemented in future smaller, faster, and untethered RCEs.
Sliker, L., Kern, M., Schoen, J.A., Rentschler, M.E., "Surgical Evaluation of a Novel Tethered Robotic Capsule Endoscope using Micro-Patterned Treads," Journal of Surgical Endoscopy. 26(10): 2862-2869, 2012.
{kind=link}