
PufferBot
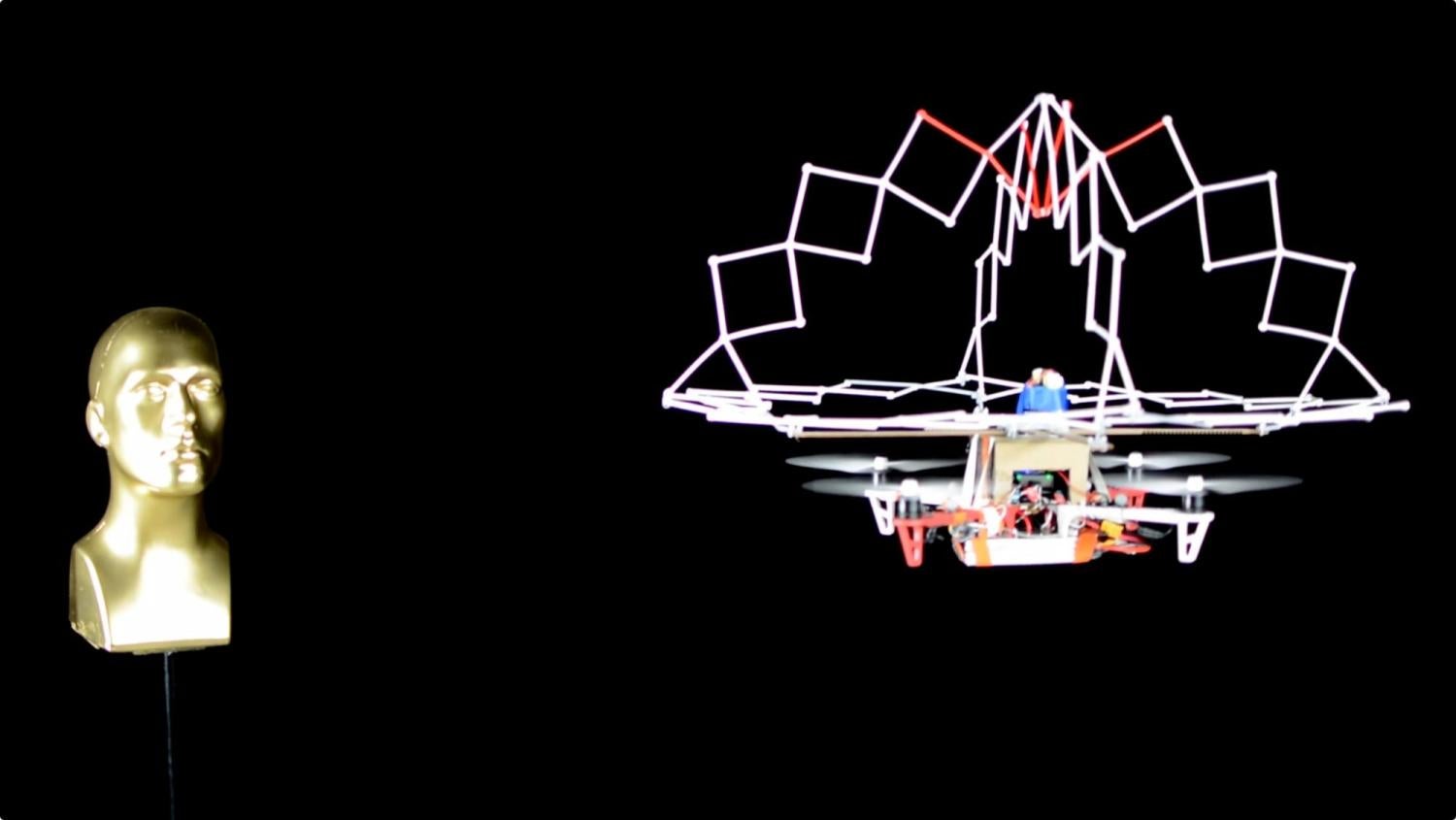
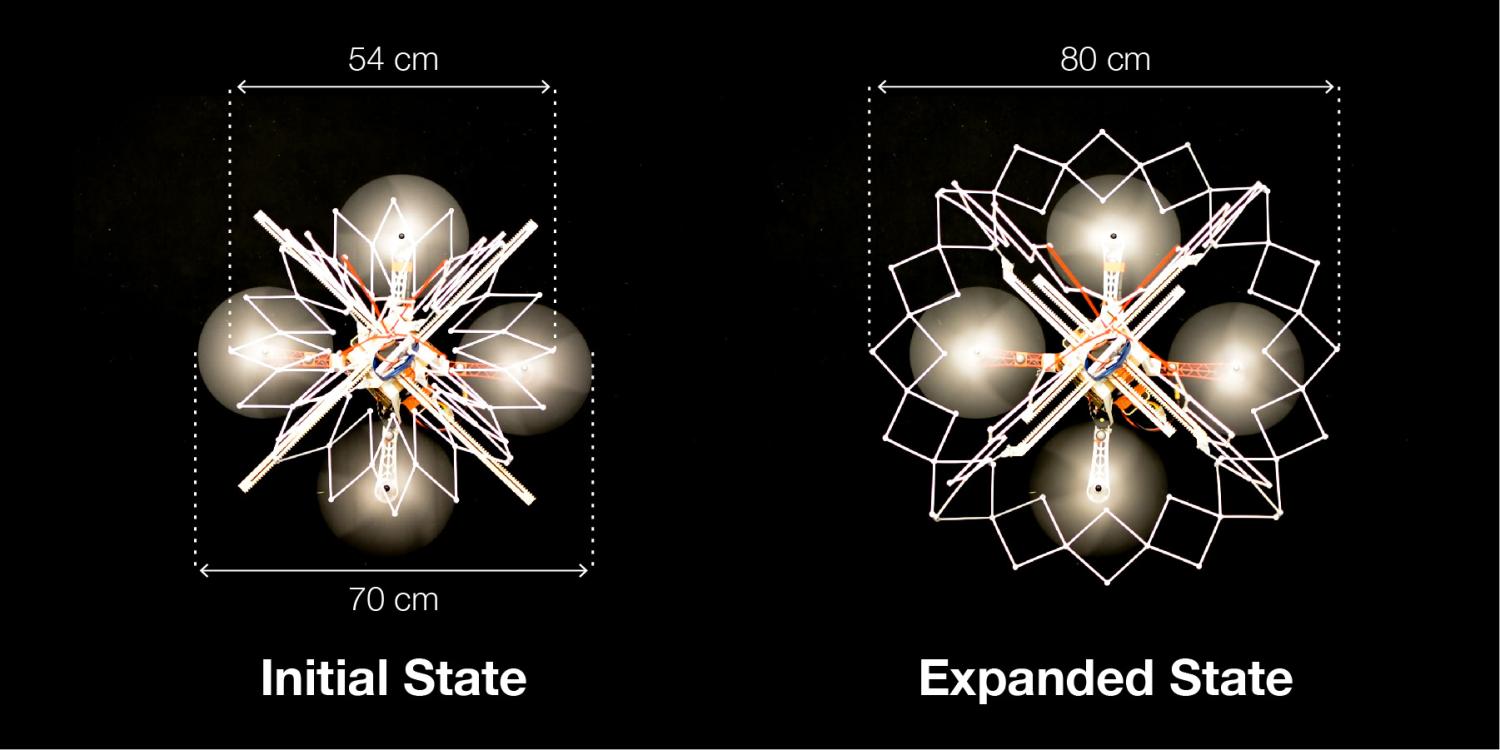
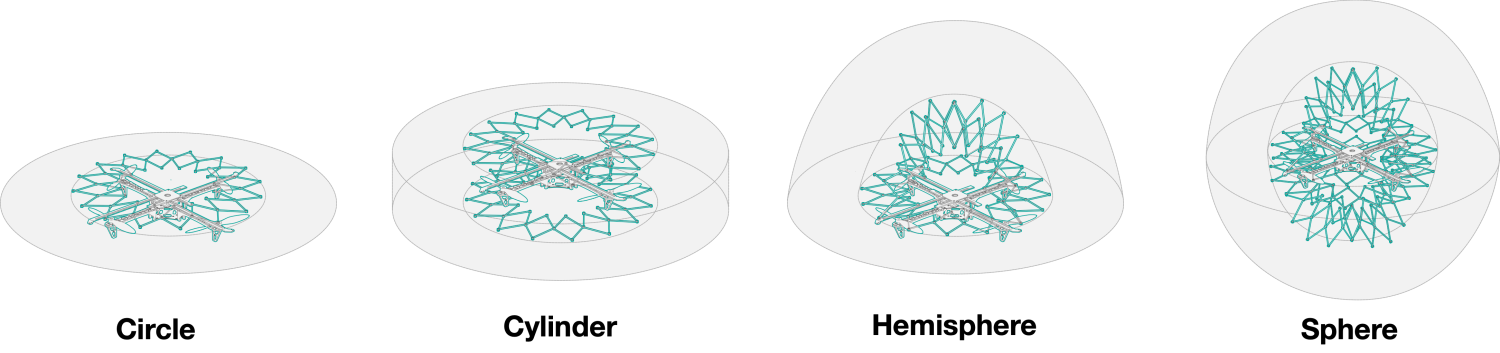
Pufferbot is an aerial robot with an expandable protective structure that deploys to encircle the drone and prevent the drone's rotors from coming in contact with obstacles or people. When flying in unobstructed airspace, the cage retracts to reduce drag and improve maneuverability. Proximity sensors can autonomously deploy the protective cage, or the operator can do so. PufferBot's protective structure is made of a 3D-printed scissor structure, which utilizes a one-degree-of-freedom actuator and a rack and pinion mechanism. The project developed four designs for the shield that suit a variety of applications.
Protecting Humans / Human-Robot Communication
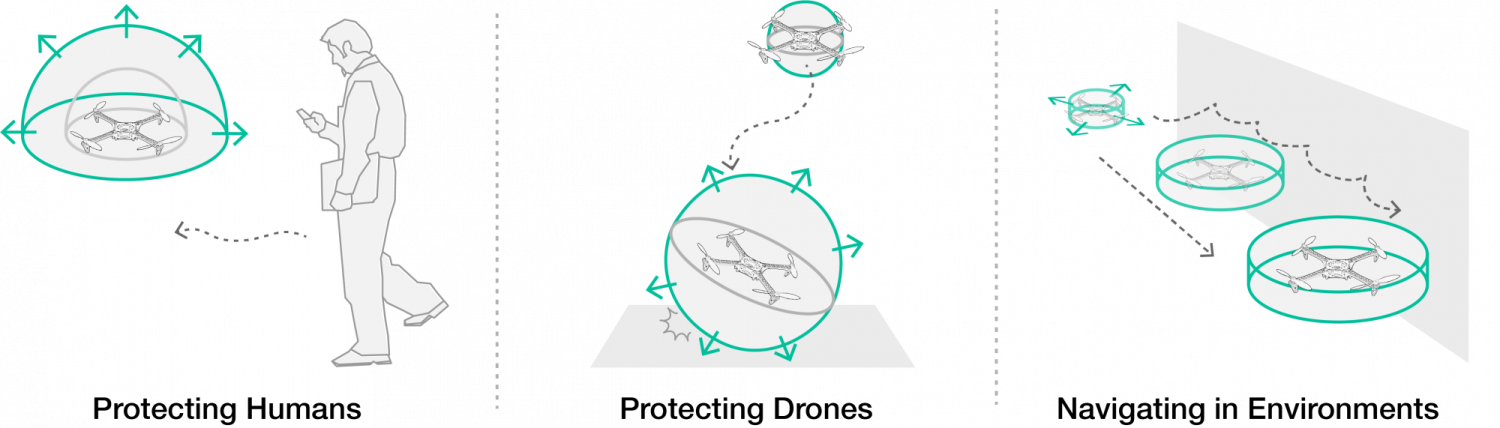
Aerial robots and humans are increasingly occupying shared spaces, whether through collaboration in the workplace or users partaking in leisure activities (e.g., a hobbyist piloting an aerial robot in their neighbourhood). While human safety is critical in these situations, developing autonomous/semi-autonomous systems capable of mitigating all risk of collisions remains an open problem, with some risks arising from humans themselves (e.g., a wandering human who is not paying attention or one who is attempting to test the robot’s behaviors might incite a collision with the robot). In these scenarios, PufferBot may reduce the risk of human injury in contacting the robot’s spinning propellers, disperse the force of the robot during a collision over a wider surface area, and provide a compliance mechanism that helps mitigate impact force.
Protecting Drones
In recent years, there has been an increasing trend in utilizing aerial robots for inspecting bridges, powerlines, pipelines, and other infrastructure elements. For these tasks, aerial robots must operate close to the target of interest, increasing the chance of the robot hitting obstacles due to operator error, loss of power, and/or unexpected elements of weather like gusts of wind. In these situations, PufferBot may protect the robot from dangerous objects in the environment. In the worst case, PufferBot may reduce damage to the robot when in free-fall by expanding to leverage the scissor structure, which acts like a spring.

Associated Researchers
An error has occured - please check your filters and try again
An error has occured with the API - please try again later
In the News
An error has occured - please check your filters and try again
An error has occured with the API - please try again later
Publications
Hooman Hedayati, Ryo Suzuki, Daniel Leithinger, and Daniel Szafir. 2020. "PufferBot: Actuated Expandable Structures for Aerial Robots". In: Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS '20). (Las Vegas, Nevada, Oct. 25-29, 2020).