This research explores a technique to rapidly prototype haptic and functional physical interfaces through desktop 3D printing and embedded static magnets.
Tactile feedback is an integral part of our interactions with physical interfaces; the ‘click’ of flicking a light switch, or the resistance of turning a doorknob, accompanies our use of these objects. They contribute to our tangible everyday experiences. Yet, take apart the simplest light switch and you will find a complex assembly of different mechanisms and materials.
While desktop 3D printing has enabled designers to efficiently fabricate physical form—embedding and specifying tactility is still a challenging task. Furthermore, even as embedded electronic afforded by platforms like Arduino help us rapidly prototype functional physical interfaces; designers often contend with off-the-shelf components—designing their prototypes around the most appropriate pre-fabricated parts they can find.
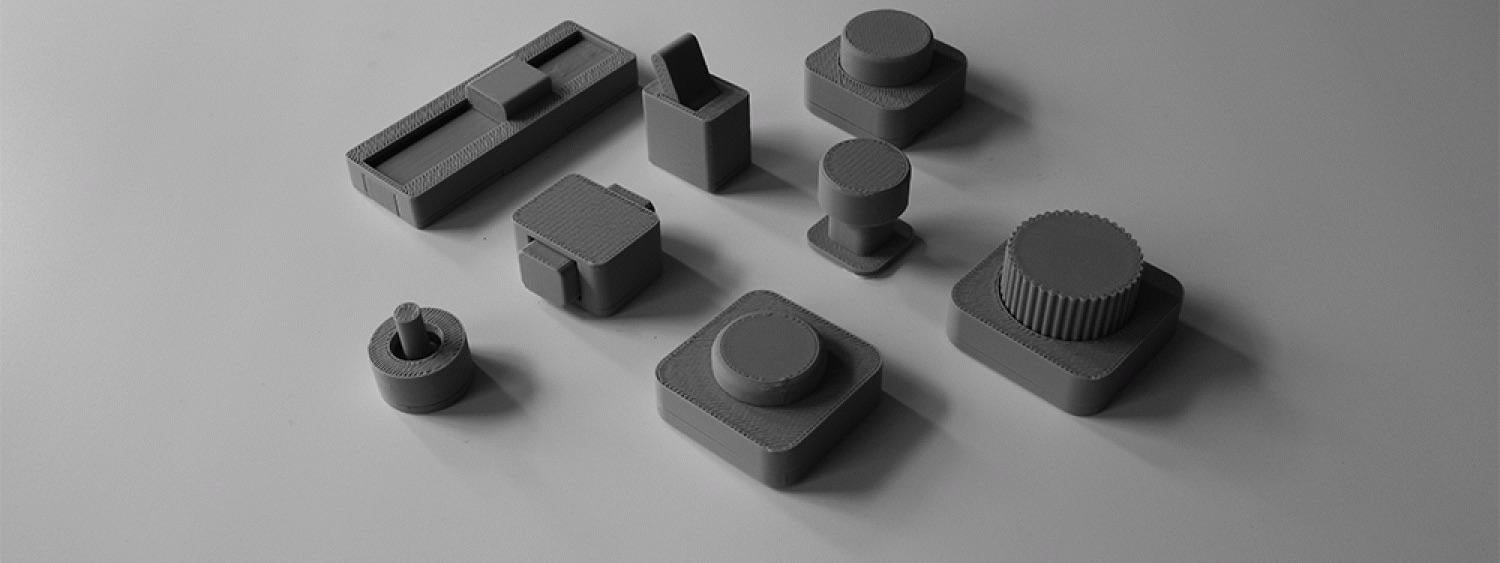
Mechamagnets aims to disrupt the prototyping process of physical interfaces by offering a technique that provides designers with an efficient means of detailing the physical form, function and tactility of physical interfaces. Through mechamagnets, designers specify different physical interaction affordances realized through 3D printed parts that assemble and move with different volumetric constraints. The position and configuration of embedded static magnets then enable different passive tactile responses. These same magnets also participate in the instrumentation of the physical interface with the help of linear Hall effect sensors.This research explores magnets as a material for prototyping tangible interactive systems. Through different rearrangements of the same magnetic unit embedded in physical widgets, we can model a wide range of tactile feedback that resembles the mechanical textures of products we encounter every day. In addition, we demonstrate how these widgets can be instrumented into functional interfaces.
ACME Lab Mechamagnets Webpage