
Swept Synthetic Aperture Imaging
Fundamental diffraction physics says that a larger aperture improves both resolution and penetration. However, aperture size has historically been limited by system complexity and unknown benefit in the presence of acoustic clutter generated by the abdominal wall. We are developing techniques based on "Swept Synthetic Aperture" - using motion of an ultrasound transducer to mimic a larger physical aperture.
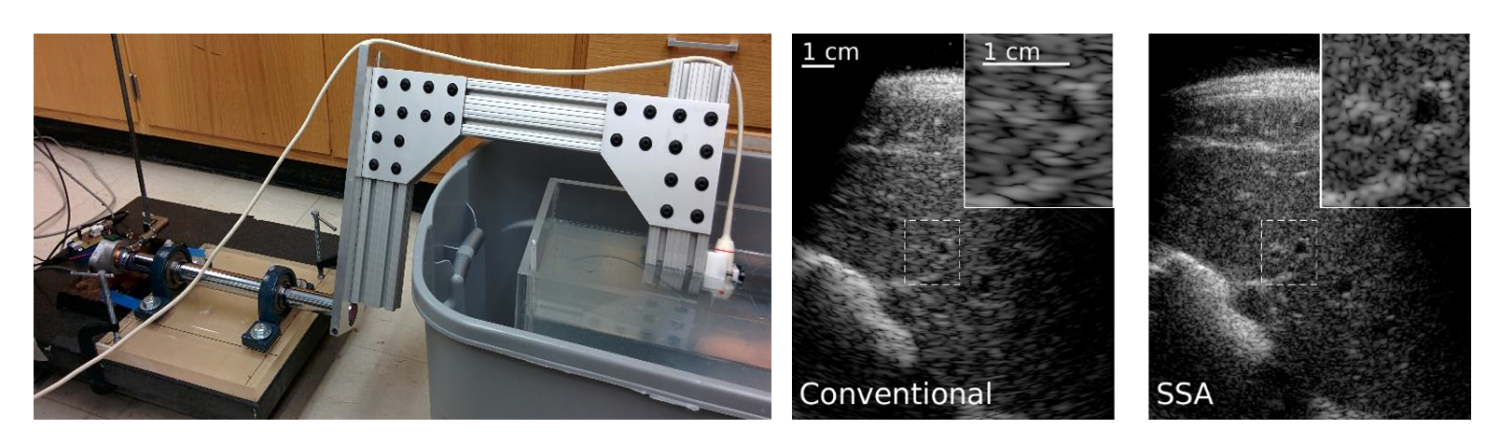
We need to know the precise position and orientation of the transducer with sub-wavelength accuracy and precision. The most straightforward way to accomplish this is with a robotic system - a mechanically constrained arm with known spatial calibration and a single degree of freedom, measured by rotary encoder, was used to rotate a transducer around a target. Synthetic aperture beamforming is used to put the individual transmissions back together coherently and the resulting large effective aperture makes liver vessels are much more clearly resolved.
Read more: Feasibility of Swept Synthetic Aperture Imaging,
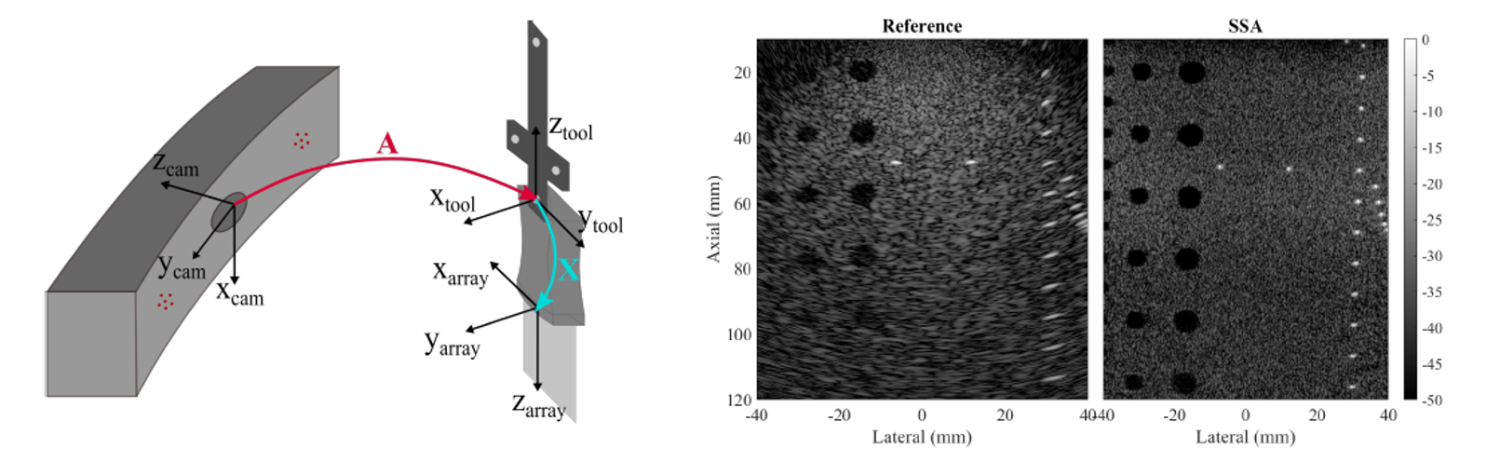
Freehand SSA imaging will make it possible to translate this approach to clinical settings where high resolution and deep penetration is demanded from even small portable probes. Optical tracking of the probe using an external infrared camera provides 3-D position and orientation accuracy on the order of 100 um. We are pursuing approaches to improve spatial calibration and beamforming of SSA images. This work was funded by NIH R03-EB032090.
Read more: Feasibility of Optical Tracking for Swept Synthetic Aperture Imaging
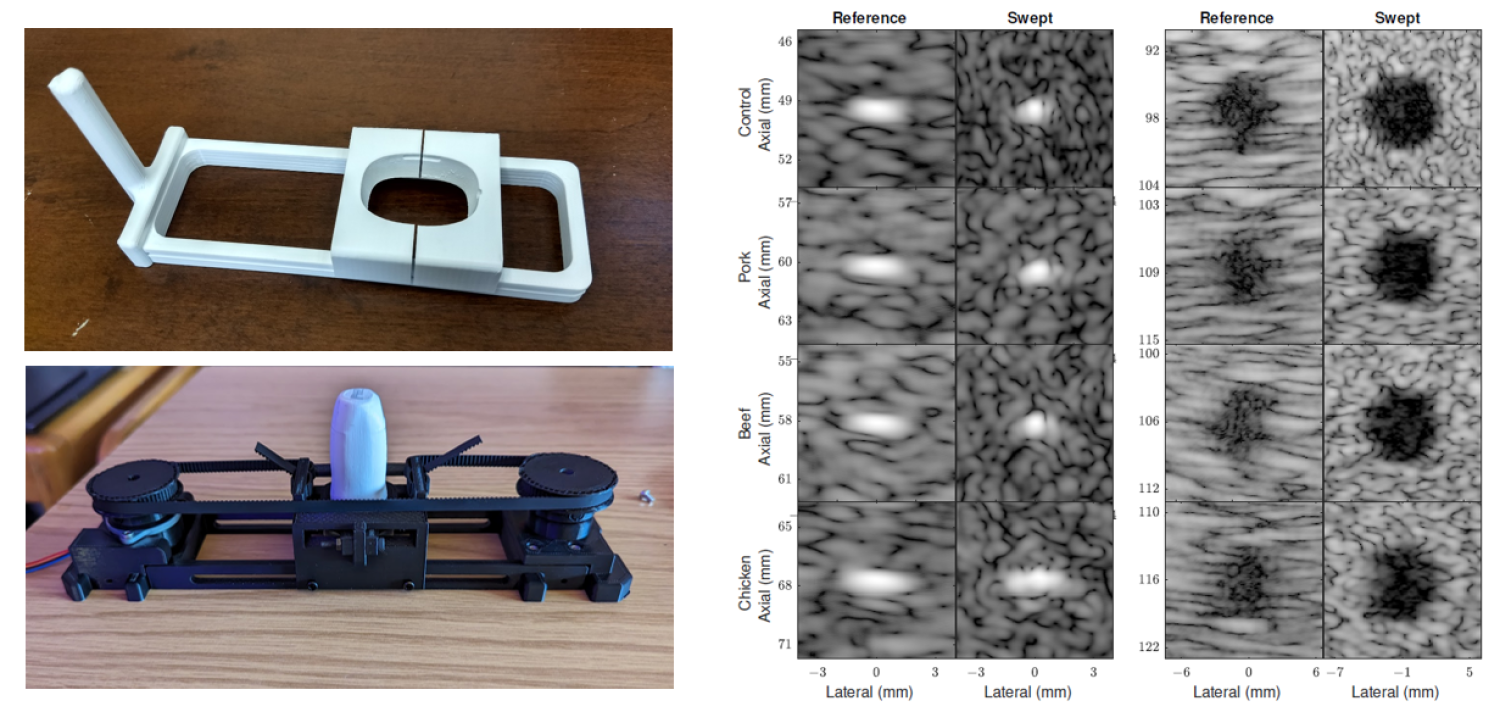
Mechanical constraints make it feasible to estimate motion directly from the ultrasound data with sufficient accuracy to perform SSA imaging without the cost/complexity of external sensors. (top) This simple 3-D printed slide device constrains motion to 1-D and correlation approaches are used to estimate lateral motion with sub-millimeter accuracy. We are now pursuing motorized versions of this approach to make it possible to acquire in vivo data.
Read more: Implementation of Constrained Swept Synthetic Aperture Using a Mechanical Fixture