Teleoperation of robots can be quite challenging, especially for novice users because it forces users to focus on low-level aspects of robot control, rather than higher level goals regarding task completion, data analysis and problem solving.
This project involved the investigation of remote control systems that help people operate complex robots. Different strategies were researched for providing assistance to robot operators, including learning more about operators' goals, so that robots could be more helpful.
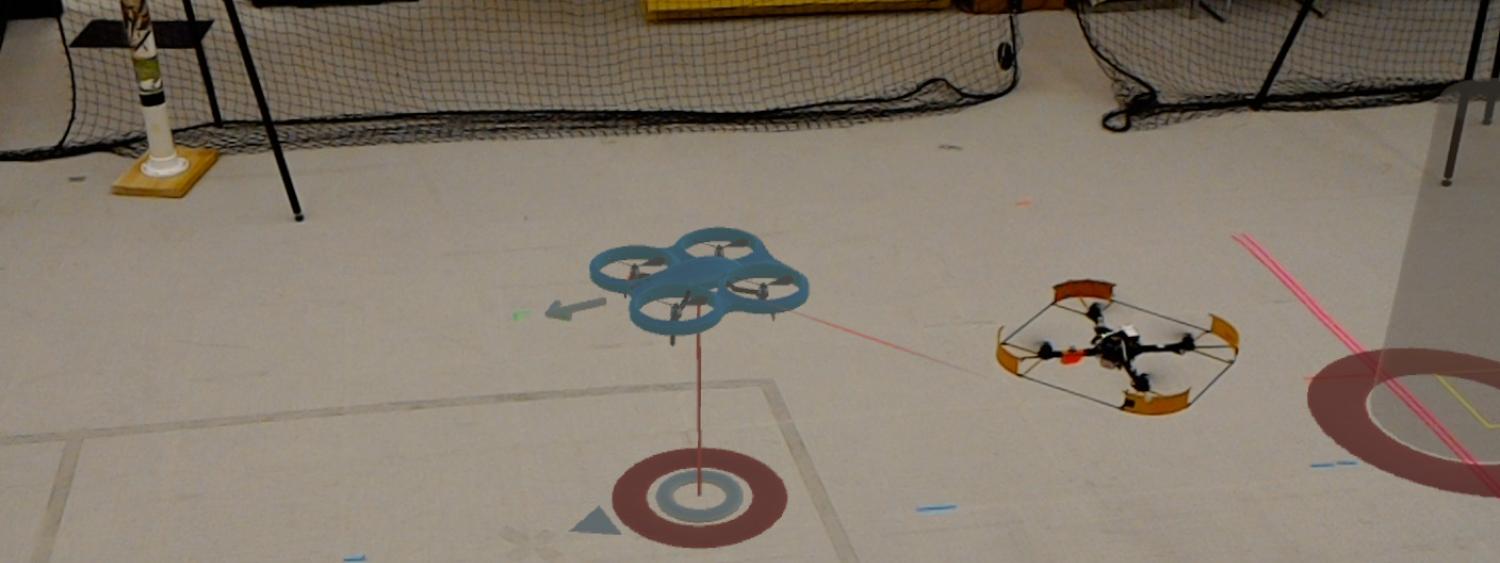
The researchers explored how advances in augmented reality (AR) may enable the design of novel teleoperation interfaces that increase operation effectiveness, support the user in conducting concurrent work and decrease stress. A key insight is that AR may be used such that a teleoperator controls a virtual robot surrogate, rather than directly operating the robot itself, providing the user with foresight regarding where the physical robot will end up and how it will get there. The researchers presented the design of two novel interfaces using such a surrogate: one focused on real-time control and one inspired by waypoint delegation. They compared these designs against a baseline teleoperation system in a laboratory experiment in which novice and expert users piloted an aerial robot to inspect an environment and analyze data. Their results revealed that the augmented reality prototypes provided several objective and subjective improvements, demonstrating the promise of leveraging AR to improve human-robot interactions.