
Publication
 Shape displays that actively manipulate surface geometry are an expanding robotics domain with applications to haptics, manufacturing, aerodynamics, and more. However, existing displays often lack high-fidelity shape morphing, high-speed deformation
Shape displays that actively manipulate surface geometry are an expanding robotics domain with applications to haptics, manufacturing, aerodynamics, and more. However, existing displays often lack high-fidelity shape morphing, high-speed deformation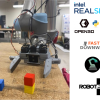 We describe a force-controlled robotic gripper with built-in tactile and 3D perception. We also describe a complete autonomous manipulation pipeline consisting of object detection, segmentation, point cloud processing, force-controlled manipulation
We describe a force-controlled robotic gripper with built-in tactile and 3D perception. We also describe a complete autonomous manipulation pipeline consisting of object detection, segmentation, point cloud processing, force-controlled manipulation Peg-in-hole assembly of tightly fitting parts often requires multiple attempts. Parts need to be put together by performing a wiggling motion of undetermined length and can get stuck, requiring a restart. Recognizing unsuccessful insertion attempts
Peg-in-hole assembly of tightly fitting parts often requires multiple attempts. Parts need to be put together by performing a wiggling motion of undetermined length and can get stuck, requiring a restart. Recognizing unsuccessful insertion attempts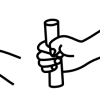 Sensory feedback provided by prosthetic hands shows promise in increasing functional abilities and promoting embodiment of the prosthetic device. However, sensory feedback is limited based on where sensors are placed on the prosthetic device and has
Sensory feedback provided by prosthetic hands shows promise in increasing functional abilities and promoting embodiment of the prosthetic device. However, sensory feedback is limited based on where sensors are placed on the prosthetic device and has Uncertainty in perception, actuation, and the environment often require multiple attempts for a robotic task to be successful. We study a class of problems providing (1) low-entropy indicators of terminal success / failure, and (2) unreliable (high-
Uncertainty in perception, actuation, and the environment often require multiple attempts for a robotic task to be successful. We study a class of problems providing (1) low-entropy indicators of terminal success / failure, and (2) unreliable (high- The need to create more viable soft sensors is increasing in tandem with the growing interest in soft robots. Several sensing methods, like capacitive stretch sensing and intrinsic capacitive self-sensing, have proven to be useful when controlling
The need to create more viable soft sensors is increasing in tandem with the growing interest in soft robots. Several sensing methods, like capacitive stretch sensing and intrinsic capacitive self-sensing, have proven to be useful when controlling Textbooks that provide a broad algorithmic perspective on the mechanics and dynamics of robots almost unfailingly serve students at the graduate level. Introduction to Autonomous Robots offers a much-needed resource for teaching third- and fourth-
Textbooks that provide a broad algorithmic perspective on the mechanics and dynamics of robots almost unfailingly serve students at the graduate level. Introduction to Autonomous Robots offers a much-needed resource for teaching third- and fourth- We present a novel augmented reality (AR) framework to show relevant information about swarm dynamics to a user in the absence of markers by using blinking frequency to distinguish between groups in the swarm. In order to distinguish between groups
We present a novel augmented reality (AR) framework to show relevant information about swarm dynamics to a user in the absence of markers by using blinking frequency to distinguish between groups in the swarm. In order to distinguish between groups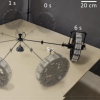 Locomotion through rolling is attractive compared to other forms of locomotion thanks to uniform designs, high degree of mobility, dynamic stability, and self-recovery from collision. Despite previous efforts to design rolling soft systems,
Locomotion through rolling is attractive compared to other forms of locomotion thanks to uniform designs, high degree of mobility, dynamic stability, and self-recovery from collision. Despite previous efforts to design rolling soft systems, We present a suite of algorithms and tools for model-predictive control of sensor/actuator systems with embedded microcontroller units (MCU). These MCUs can be colocated with sensors and actuators, thereby enabling a new class of smart composites
We present a suite of algorithms and tools for model-predictive control of sensor/actuator systems with embedded microcontroller units (MCU). These MCUs can be colocated with sensors and actuators, thereby enabling a new class of smart composites