
Self-Healing and Self-Sensing High-Performance Artificial Muscle
Problem
As one of the most important prosthetic parts for disabled person, commercialized prosthetic hands still facing a bulky, heavy and complex design. A light weight, flexible, and low-cost prosthetic hand is in demand. However, one of the challenges is the “muscle” that drives the joints and parts, conventional options are step motors and complex transmissions, which lead to the heavy and bulky design. Smart materials that are soft, light and low cost offer better options for such application, for examples, shape memory alloy and dielectric elastomers. Developing smarter materials can not only help improve prosthetics, it can also allow for camouflage molding to the environment, and the use of more flexible and advanced robots.
Solution
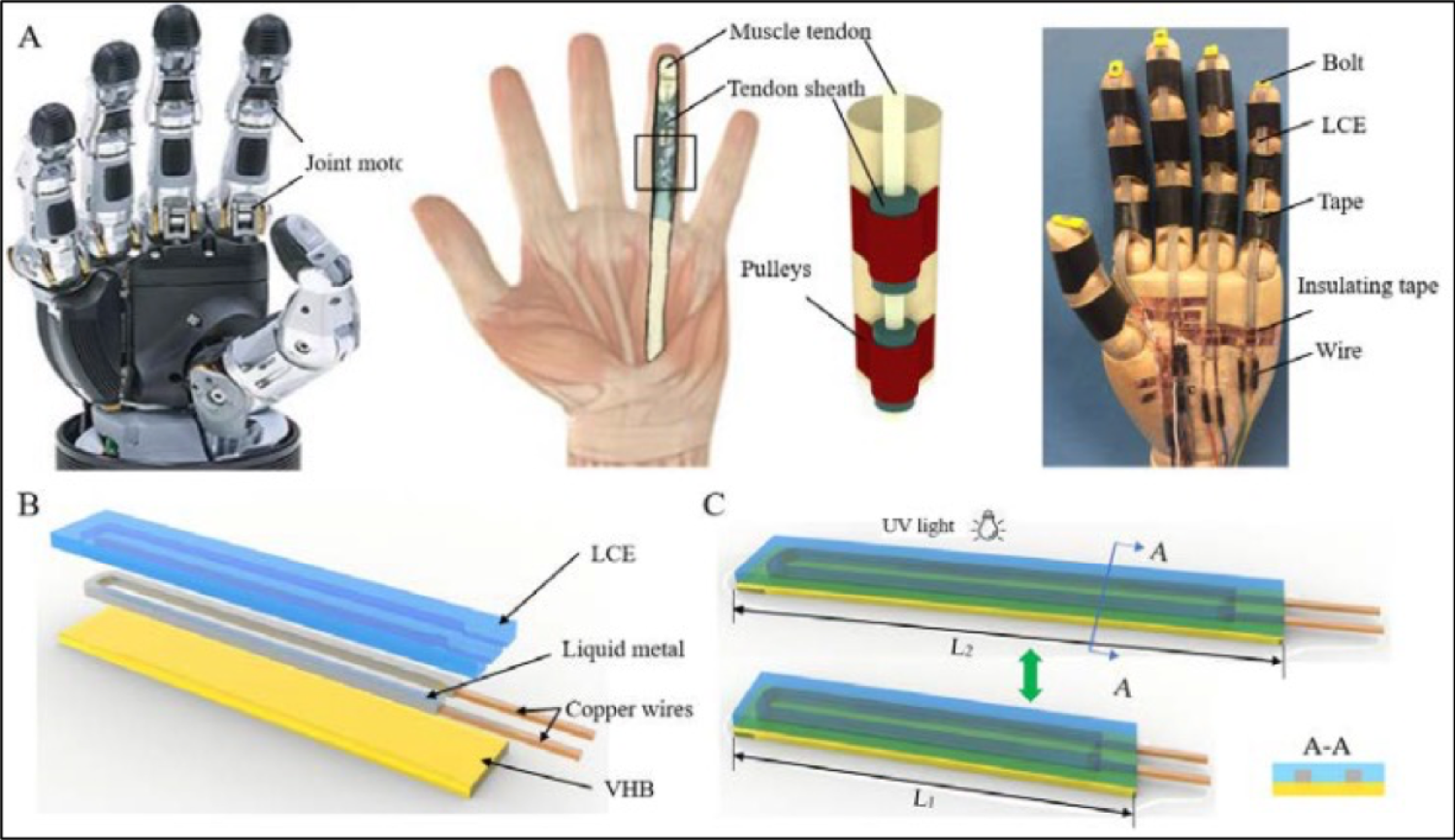
Liquid Crystal Elastomers (LCEs) exhibit the most similar actuation behavior to natural muscle, due to their dramatic contraction, reversible deformation, response to multiple stimuli, and great potential for micro-scale robotics. CU Boulder researchers, led by Dr. Jianliang Xiao, have designed an LCE network based on a two-stage thiol–acrylate reaction, and embed patterned LM heater (99.99% Gallium, Amazon) directly into the LCE network. The LM heater deforms with the LCE network during alignment with no damage. Linear actuation, bending, and twisting are easily realized with this system. Gallium (melting at 30℃) was chosen as the material for the LM heater and patterned using stencil methods. The LM heater not only remain robust during actuation but also does not confine the deformation of LCE networks. Large linear strains over 100% can be realized, which is much higher than natural muscle. Inspired by biological tissue, passive and active materials are then combined as a system, mimicking dramatically changing surface patterns. Taking advantage of the sensing capability of LM heaters, a self-sensible soft walker is also realized.
Pictured above: Design, fabrication, and the structure of LCE: (A) Robot hand by joint motor. (B) The tissue structure of real fingers. (C) The structure of robot hand based on LCE drive. (D) The structure of LCE. (E) The working principle of LCE. (F) The structure of LCE from another perspective.
Advantages
Most econometrical prosthetic hands are still lack of durability, high performance, lightweight, Bionic-look, and affordability. Commercial prosthetic hand are based on a mechanical design that has stiff joints and low degrees of freedom, since all the power sources are from DC motors. This in turn leads to the bulky, heavy, complex and expensive products in the market nowadays. To overcome this, new mechanisms for auctions has been introduced, instead of using DC motor and mechanical gear systems, a tendon driven design have been introduced and was able to mimic the natural movements of human hands. However, such design still depended on DC motor as the power and required more space for the interconnectors between artificial tendon and the motor. Using combined LCE actuators with liquid metal heaters in a way that both large actuation strain and robustness can be achieved while still being affordable and flexible.
Market Application
This has potential applications for:
- Robotics
- Soft Robotics
- Prosthetics
- Camoflauge
What's Next?
This advanced technology applicable for various industries is available for exclusive or non-exclusive licensing.
Nicole Forsberg: nicole.forsberg@colorado.edu
The Newsroom
For marketing and communication inquiries or news tips, contact Daniel Leonard, senior marketing and communications specialist for Venture Partners at CU Boulder.
For media inquiries, please visit colorado.edu/news/formedia.