
Labs and Facilities

This 17 person multimedia conference room is equipped to facilitate meetings and small lectures. Multi-user voice conferences are managed by a Polycom SoundStation 2 Expandable Conference Phone. Multi-user video conferences are managed by a 55” Samsung F6300 Series Smart TV and an Intel NUC mini-PC running Windows 10 Enterprise. The video conferencing can be done using the most popular methods including Skype, GoToMeeting, & WebEx. Room Scheduling is handled by in EMS

The CCAR reception area is a newly refinished with lounge style tables and chairs, signage, and a 47” Samsung Smart TV displaying CCAR related pictures and videos. This area also houses the Lexmark CS510de color laser printer, Konica-Minolta photocopier, and Faculty / Staff mailboxes.

Graduate students within CCAR are either assigned a desk in one of the research labs or in one the areas maintained for student use. In these areas, computers are assigned on a case by case basis depending on the work and needs of the student. All students will have access to either the UCB Wireless network or the CCAR managed wired network for connectivity of personal laptops or CU owned computers.

The RF & SatNav Laboratory, more formally “The Radio Frequency and Satellite Navigation Laboratory”, is the preeminent academic laboratory for the research and investigation of software defined radio applied to satellite navigation receivers.
The laboratory is directed by Professor Dennis Akos who implemented the first Global Positioning System (GPS) software defined radio in the mid-1990s. Since the laboratory was established in 2005, the work of Professor Akos, his collaborators, and students have furthered all aspects of satellite navigation technology from the antenna design, advanced radio processing, and the digital signal processing. This work initiated with the US Global Positioning System (GPS) but has since expanded to included efforts across the three other global constellations: GLONASS, Galileo, and Beidou; as well as the various regional space-based augmentations systems. The efforts of Professor Akos and his group helped: propel the low-cost technology enables GPS/GNSS into the mobile phone, pioneer remote sensing receiver architectures using GPS/GNSS signals, provide integrity and robustness
The Aerospace Engineering Sciences department at the University of Colorado offered detailed instructional courses on the operation of satellite navigation.
Despite the commoditization of the GPS/GNSS receiver in the commercial marketplace, the prevalence and importance this technology cannot be understated. Current research effort are focused on: (a) ensuring robust, continuous, and high integrity operation for all users of GPS/GNSS across all platforms; (b) unique GPS/GNSS receiver architectures for specialized applications including space operation and remote sensing; (c) the use of GPS/GNSS for autonomous vehicles.
The Bosanac group focuses on leveraging the chaos of multi-body dynamical systems to advance astrodynamics and celestial mechanics applications. In this computational facility, researchers are currently focused on improving trajectory design and optimization techniques for spacecraft as well as expanding the insight extracted from dynamical systems techniques. The Bosanac group uses this research to support: trajectory design for missions to new destinations within the solar system for science, technology demonstration or infrastructure purposes; using trajectory design as an enabling technology for CubeSat and SmallSat mission concepts; and improving both the accessibility of space and the reusability of space-based assets.

The Vision, Autonomy, and Decision Research (VADeR) Lab's Space Domain Awareness Observatory leverages advanced optical technologies to support cutting-edge research in space situational awareness (SSA). Utilizing data from two specialized telescopes along with a high-speed event camera that detects changes in photon counts, the lab focuses on identifying and characterizing objects in orbit. By analyzing reflected light properties such as brightness, color, and polarization, our team of Skywatchers investigates key object characteristics including shape, material, attitude motion, and mass properties. This enables us to distinguish between active and non-maneuvering satellites and make informed predictions about their behavior in space.
Current technical research projects in the VADeR Lab include Cislunar Space Situational Awareness (initial orbit determination, custody), Astrography (the study of dynamical systems theory and how we can use it to help decision-makers in space), Sensor Exploitation (Event Cameras, etc.), Decision-support, including analog and digital conflict simulation, and others.

The Space Weather Lab focuses on scientific inquiry into near-earth space. The work includes collaborations with NOAA National Geophysical Data Center with the aim to update, improve, and leverage various spacecraft datasets that provide information about energy deposition and dissipation at LEO altitudes. The primary focus is improving estimates of satellite drag. The analysis and archiving solution is Linux-based and leverages multiple mirrored workstations and redundant external and cloud-based storage to ensure dataset integrity and avoid disc-access bottlenecks. Our toolchain is primarily MATLAB and Python based, but includes IDL, Fortran and Javascript/jQuery.

The Real-Time group manages an extensive database of near real-time and historical satellite altimeter data and analyses. The database is currently being updated and a new version of the archive will be online at a future date.

The Lightning, Atmosphere, Ionosphere, and Radiation Belt research group (The LAIR) is part of the Aerospace Engineering Sciences (AES) department at the University of Colorado Boulder. Most of our research studies lightning and thunderstorms and their electromagnetic effects on the ionosphere, magnetosphere, and radiation belts - what we call the "near-Earth space environment". We also work on a variety of other projects, the common theme of which is the application and study of space plasma physics.

Geospace Data Science Lab aims to advance the science and engineering of forecasting, as applied to the Earth’s atmosphere from the ground to near-Earth space environments, while developing fundamental understanding of the predictability of a coupled system of the whole atmosphere, ionosphere, and magnetosphere. Prediction of constantly changing environmental conditions, affected by both space and terrestrial weather, requires a systematic integration of observations with a first-principles models using data assimilation. Data assimilation reduces uncertainties in initial conditions and drivers, extending the predictive capability of numerical models of near-Earth space environments. The data assimilation and ensemble-based probabilistic modeling framework being developed can be used for designing of future missions and targeting of observations to maximize scientific returns of observing systems. Geospace Data Science Lab also focuses on methodological problems, including the development of scalable data assimilation methods for high-dimensional problems, inversion and machine learning techniques to extract relevant geophysical information from large volumes of heterogeneous remote sensing and in-situ sensor data.
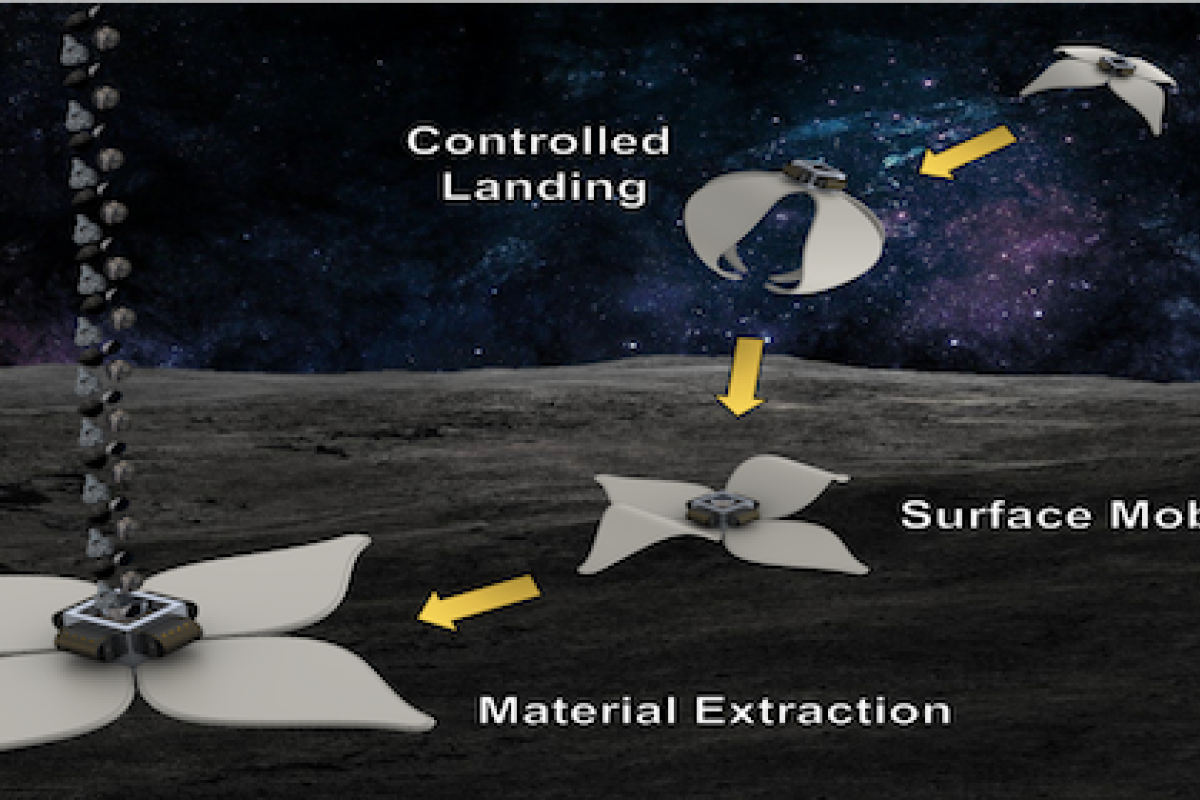
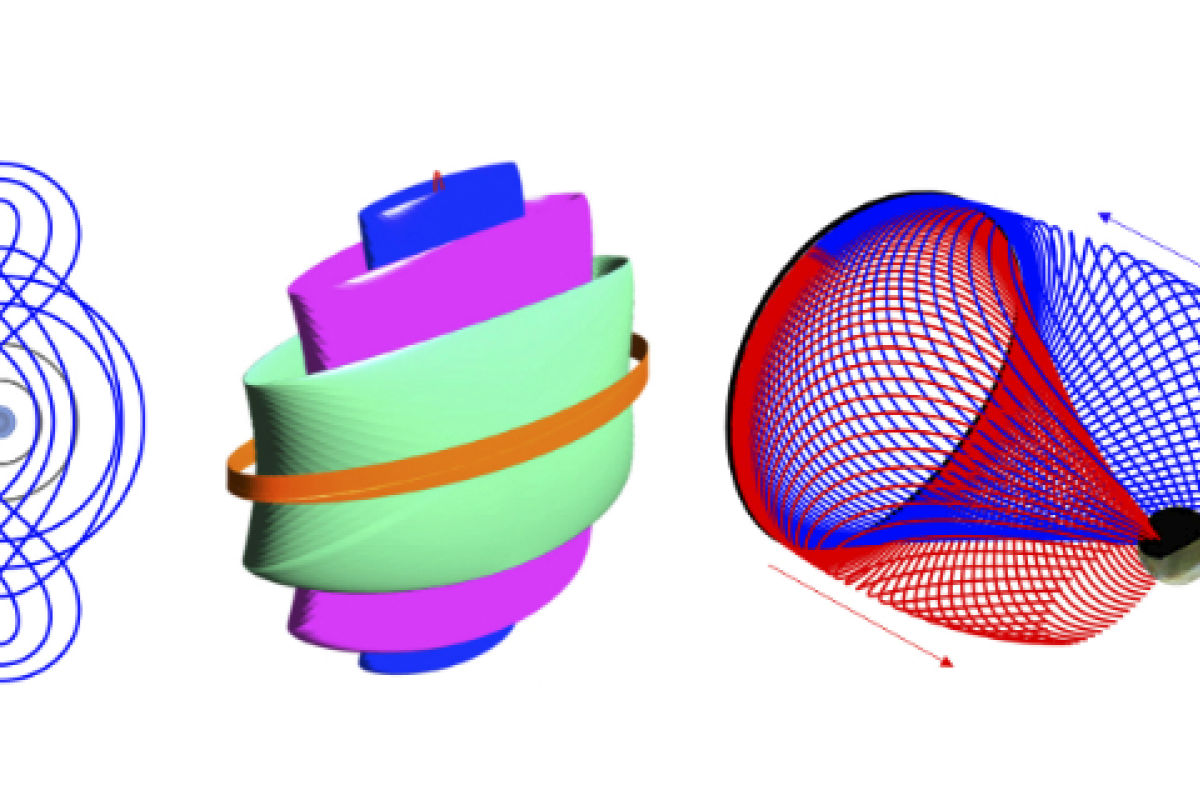
Professor McMahon heads the ORCCA lab, which conducts research focused on in intersection and application of astrodynamics, spacecraft guidance, navigation, and control (GNC), and small bodies science. Particular topics of current interest and support include: radio science for OSIRIS-REx; NIAC Phase II: Dismantling Rubble Pile Asteroids using Area-of-Effect Softbots (AoES); shape modeling and relative navigation around small bodies using radiometric, optical imaging and LIDAR data; non-Keplerian dynamics and associated guidance, navigation, and control algorithms; spacecraft autonomy; asteroid mining and in-situ resource

The Satellite Navigation and Sensing (SeNSe) Laboratory, led by University of Colorado Distinguished Professor and Helen and Hubert Croft Professor Jade Morton, conducts research at the intersection of satellite navigation technology and remote sensing of the Earth's ionosphere, atmosphere, and surface. The lab is part of the Ann and H.J. Smead Aerospace Engineering Sciences Department and is home to a team of graduate students, postdoctoral researchers, and research scientists and engineers working on problems that span signal processing, space weather, Earth observation, and resilient PNT.
Research areasinclude: ionospheric and space weather monitoring using ground-based and spaceborne GNSS networks; GNSS Reflectometry (GNSS-R) for ocean altimetry, inland water mapping, ice surface characterization, ionospheric observations, and atmospheric water vapor retrieval; advanced GNSS receiver design and signal tracking under challenging conditions such as ionospheric scintillation and radio frequency interference; and machine learning applications across all of the above.
Infrastructure and capabilities include a worldwide network of multi-constellation, multi-frequency GNSS monitoring stations supporting space weather and radio interference research; software-defined radio (SDR) systems and high gain antennas for flexible LEO satellite transmitted signal capture and processing; Spirent GNSS signal simulator; a Skydel simulation software platform; high-gain antenna installations for mountaintop and experimental GNSS-R work; and access to data from commercial small satellite constellations including Spire Global and PlanetiQ.
The SeNSe Laboratory has been supported by AFOSR, AFRL, DARPA, DHS, NASA, NOAA, NSF, ONR, Google, JPL, Lockheed Martin, Northrop Grumman, Orolia, Septentrio, Spirent, UCAR, and others, with funded projects exceeding $25M over the past two decades. Lab alumni have gone on to faculty positions, research scientist roles at NASA, UCAR, and national labs, and positions in the space industry.

The Sea Level & GRACE Research Group studies involve global and regional sea level measurements using satellite altimeters; processing of low-level data into climate-quality estimates of global mean sea level; research into sea level change and attribution to climate and interannual variations; analysis of GRACE data for geodesy. The group utilizes two Gentoo workstations: AMD Quad-Core, 16 GB RAM, shared 12TB RAID systems and a Mac based cluster with 10-nodes and a 7 TB RAID.

The STIg is a 500 sq. ft. lab designed for subsystem testing and integration. All lab benches are equipped with ESD mats, chairs, continuous monitors and ionizers. Students are required to wear ESD coats while working in the lab. Lab equipment includes an ultrasonic cleaner, Helmholz cage, Agilent 480W solar array simulator 9kHz-3GHz Agilent spectrum analyzer and 9kHz-3.2GHz Rhode-Schwartz signal generator, plus multimeters, oscilloscopes, and power supplies. Research is done using four different workstations. There are two lab systems running Windows 7 Enterprise and then two ITAR compliant systems running RedHat Enterprise Linux and Windows 7 Enterprise for specialized work.

The Autonomous Vehicle Systems (AVS) laboratory is doing research in autonomous spacecraft scheduling, complex spacecraft dynamics, formation flying, and space debris removal, as well as developing mission analysis and support tools. Among these projects, the AVS lab is currently working on advanced Attitude Dynamics and Control (ADCS) systems and Rendezvous, Proximity Operations, and Docking (RPOD), using an in-house C-Code simulation environment called Basilisk that is capable of simulating the high-fidelity dynamics of dynamic actuation systems. Basilisk can provide hardware-in-the-loop simulation capabilities. Further, the AVS lab is engaged in relative motion actuation research using electrostatic force fields where the space environment impact on close-proximity relative motion dynamics is studied. Several research efforts are considering aspects of the space debris challenge, such as investigating the macro-level motion of GEO debris as well as touchless debris mitigation systems using an Electrostatic Tractor concept. Finally, and most relevant to this proposal, the Basilisk framework is being used to develop novel autonomous spacecraft commanding solutions where machine learning and AI techniques are used to determine suitable flight modes and predict spacecraft resource consumption. Agile Autonomous scheduling solutions are being developed for Space-to-Earth and Space-to-Space image tasking.
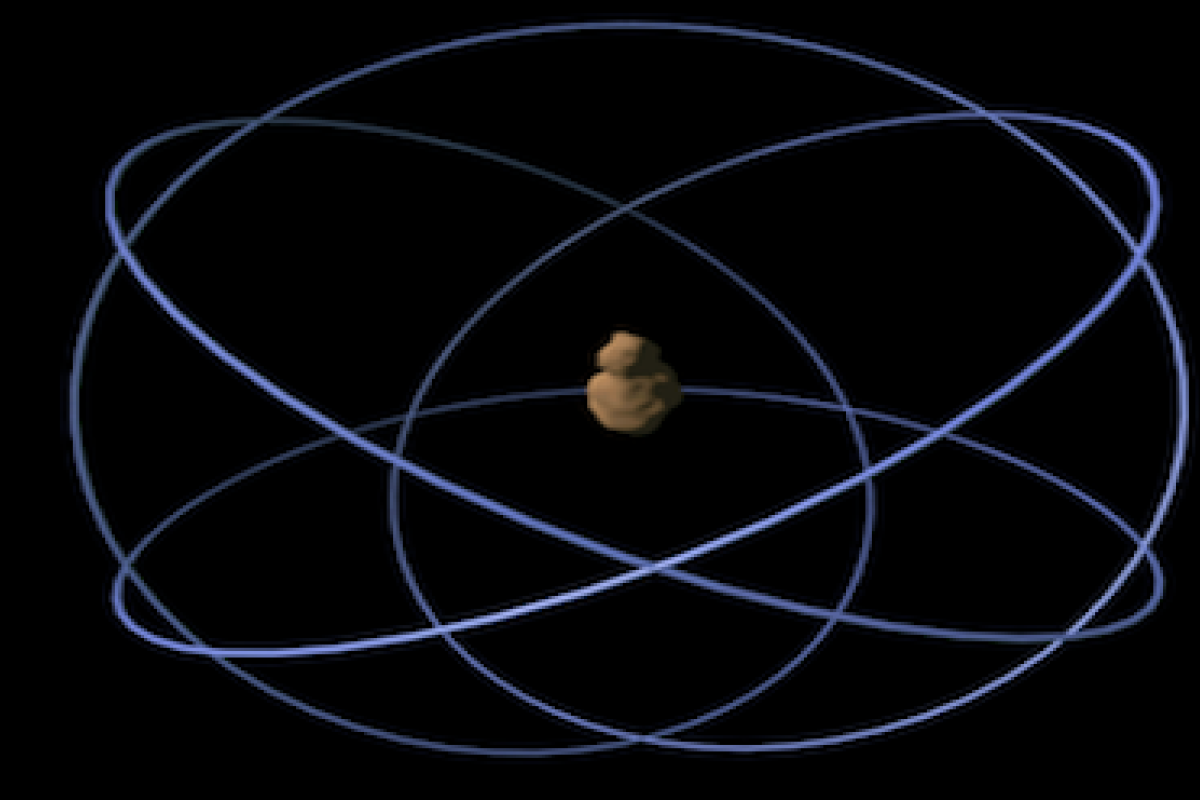
CSML studies the fundamental mechanics of natural bodies, spacecraft, and debris within space environments throughout the solar system. The students and researchers that work at CSML have at their disposition three Mac Pro systems to carry out their research not including their individual laptops. As a whole, these systems can use 36 cores, allowing them to run up to 72 processes at any given time, with a combined storage capacity of 20TB. Given the always increasing computing needs of their research and their collaborators' (NASA, Ball Aerospace Inc., SwRI, Lockheed Martin Aerospace), these systems are accessible and fully utilized all year round. Additionally, this group has started experimental work on the dynamics of granular systems as this is related to surface dynamics and pod deployment on small NEOs.

The Active Remote Sensing Lab (ARSENL) consists of a 400 sq. ft. optics lab, a 600 sq. ft. RF electronics lab, and a 600 sq. ft. graduate student office space for 8 PhD students. The optics lab includes two full optical benches, optical/electronic diagnostic equipment, lasers and optical components to support research in designing, developing, and deploying lidar systems. The RF electronics lab includes electronic equipment, VHF radar transmitters and receivers, and data acquisition systems to support research in VHF radar system design, development and deployment. These active remote sensing techniques have led to field deployments in such remote locations as the Arctic and Antarctic. The lab supports research in geosciences involving water, atmosphere and space with a student workforce from PhD to undergraduates and even high school students.