
Unmanned Systems
RECUV deploys a wide variety of unmanned systems that include fixed-wing aircraft, helicopters, multi-rotors, self-driving cars, and mobile ground robots.


The miniature Datahawk can measure temperature, wind speed and direction, humidity, and atmospheric turbulence.

The Pilatus P1-A designed to carry a payload of up to 20 lbs.

The foam Skywalker UAS has a spacious payload bay that makes it ideal to prototype sensors, software, and other hardware.

The 3DR Solo is used for videography, photogrammetry, and data colection in complex areas like alpine forests.

The Bergen Observer is a conventional helicopter with an integrated gimbal unit.

The FX-79 Buffalo is a foam aircraft with large payload bay for ease of use and testing of multiple payloads.

The Swift Trainer is used to train the team on the Black Swift Technologies avionics systems, and to perform photogrammetry missions.
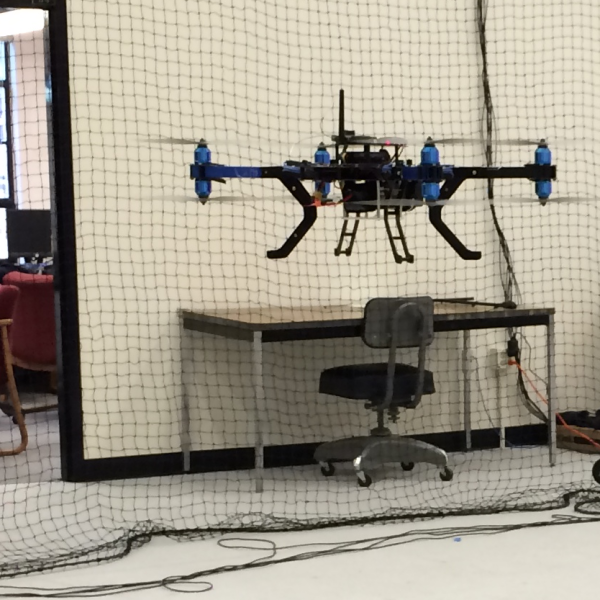
The X8 multi-rotor carries collision avoidance sensors for autonomous indoor flight.

The NexStar UA designed for net-centric operation using the NetUASC3 communication, command, and control architecture.

This multi-rotor UAS is mainly used in the Indoor Flying Robot Lab to demonstrate planning and control algorithms.
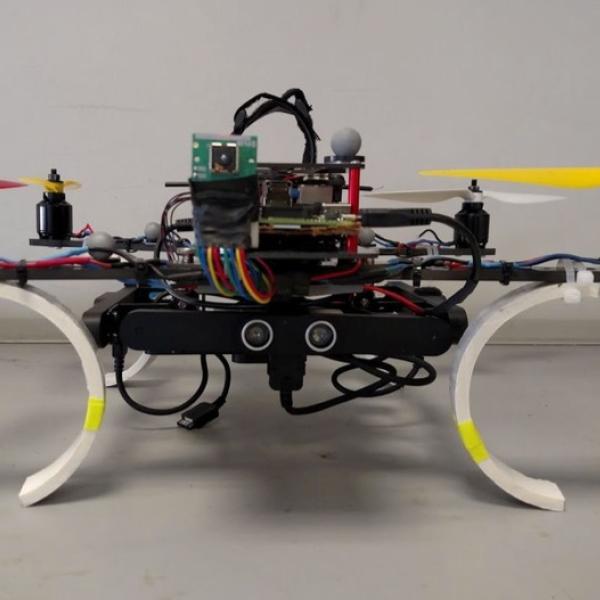
The Flynet quadrotor explores and maps indoors spaces.