
Research

Research projects focus on establishing the fundamental connections between sensing, communication, computation, and control in robotic sensor networks by synthesizing elements of autonomous systems, control and navigation, aviation, robotics, artificial intelligence, and cyber-physical systems. We combine the investigation of theoretical issues with the design, implementation, and demonstration of autonomous heterogeneous robot teams. Most projects culminate with experimental testing and evaluation in realistic field settings.

In-situ Collaborative Experiment for Collection of Hail In the Plains (ICECHIP)
- Investigators: Katja Friedrich (PI), Brian Argrow, and Eric Frew
- Sponsor: National Science Foundation
The goal of the In-situ Collaborative Experiment for Collection of Hail In the Plains (ICECHIP) field campaign is to develop the first holistic characterization of hail and its effects on society through observation and analysis, enabled at multiple scales by advances in technology. Coordinating with dozens of mobile sensor platforms, our team will deploy uncrewed aircraft systems for post-storm hail-swath surveys.
 Distributed Autonomous Robotic Information Gathering (DARING)
Distributed Autonomous Robotic Information Gathering (DARING)
- Investigators: Eric Frew
- Sponsor: Draper Laboratory
The goal of this work is to develop a framework for distributed autonomous robotic information gathering (DARING) in constrained communication environments by teams of mobile robots. The project will investigate algorithms for decomposing communication- and computation-aware team objectives into local decision-making algorithms that do not rely on persistent network connectivity.
 Volcanic Emission iNvestigation Utilizing Single-particle In-situ Automated Nephelometry (VENUSIAN)
Volcanic Emission iNvestigation Utilizing Single-particle In-situ Automated Nephelometry (VENUSIAN)
- Investigators: Margaret Tolbert (CU PI) and Eric Frew
- Collaborator: Christopher Carr (Georgia Institute of Technology)
- Sponsor: NASA
This project is carrying out systems-level testing of an autofluorescence nephelometer (AFN) intended to study the clouds of Venus. Our team will deploy the sensor on a small UAS and conduct data collection flights near an active volcano. These flights will help validate the sensor, improve science return from the Rocket Lab Mission to Venus, and demonstrate a proof of principle for improving volcanic sulfur emission knowledge on Earth.
 Decentralized Planning for Dynamic Space Environments
Decentralized Planning for Dynamic Space Environments
- Investigators: Eric Frew (PI) and Nisar Ahmed
- Sponsor: Lockheed Martin
The proliferation of platforms for space-based remote sensing, increased edge processing capabilities, and new applications challenge spacecraft constellations to maintain effective data sharing to enable fusion and target tracking across heterogeneous constellations in highly dynamic environments. This research will investigate and prototype novel concepts and algorithms to enable decentralized planning and communication in dynamic and adversarial environments. This research will also investigate enabling distributed fusion for target tracking in high-latency and low-bandwidth space environments.
 I/UCRC Phase 1: Center for Autonomous Air Mobility and Sensing (CAAMS)
I/UCRC Phase 1: Center for Autonomous Air Mobility and Sensing (CAAMS)
- Center Director: Eric Frew
- Collaborators: Brigham Young University, Texas A&M, University of Michigan, University of Pennsylvannia, Virginia Tech Universtiy
- Sponsor: National Science Foundation
The Center for Autonomous Air Mobility and Sensing was established in 2022 and is an Industry/University Cooperative Research Center involving the University of Colorado Boulder, Brigham Young University, Penn State University, Texas A&M University, University of Michigan and Virginia Tech. CAAMS is a partnership between academia, industry, and government to offer pre-competitive research in autonomous air mobility and sensing. We blend theoretical advances with hands-on demonstration and assessment in realistic field conditions.
 Constraint-Aware Fast Planning, Guidance, and Control for UAM in Urban Environments
Constraint-Aware Fast Planning, Guidance, and Control for UAM in Urban Environments
- Investigator: Eric Frew
- Collaborators: Andrea L'Afflito (Virginia Tech)
- Sponsors: Draper Laboratory and the Center for Autonomous Air Mobility and Sensing (CAAMS)
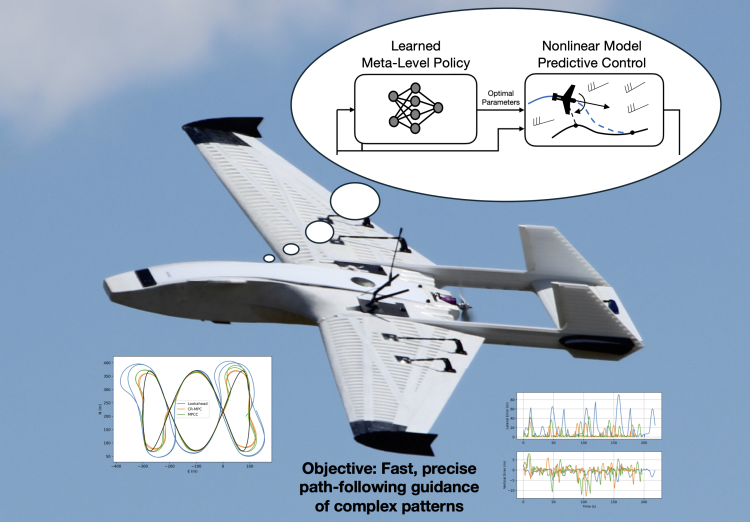
Learning-enhanced model predictive control (LE-MPC) is a framework for aircraft guidance in which imitation learning is used to design meta-policies that determine parameters for a nonlinear model predictive controller. In this project, the LE-MPC framework will be applied to guidance policies for a tail-sitter aircraft in highly dynamic environments. Baseline versions of the LE-MPC algorithms will be implemented and assessed through flight experiments. The LE-MPC framework will produce a fast, onboard planning and control system for autonomous air mobility systems.
 NRI: Dispersed Autonomy for Marsupial Aerial Robot Teams
NRI: Dispersed Autonomy for Marsupial Aerial Robot Teams
- Investigators: Eric Frew (PI), Brian Argrow, and Zachary Sunberg
- Collaborator: Adam Houston, University of Nebraska - Lincoln
- Sponsor: National Science Foundation
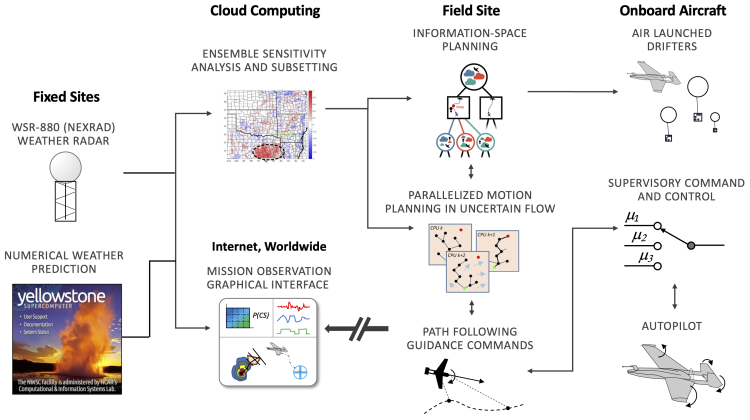
This project will conduct innovative integration of robotics technologies to create Marsupial Aerial Robot Teams (MARTs) whereby small uninhabited aircraft systems (i.e. drones) carry smaller aircraft to provide observations of the atmosphere. Effective advanced warning systems enabled by the data collected by MARTs could drastically reduce the loss of life and damage caused by severe weather. Aerial robotic systems operating in places too dangerous for humans or expensive single-vehicle systems will need to reason over detailed models and large amounts of data. This project will create and deploy a team of robots that will be like an autonomous airborne meteorologist performing online targeted forecasting.
 CPS: Correct-by-Construction Controller Synthesis using Gaussian Process Transfer Learning
CPS: Correct-by-Construction Controller Synthesis using Gaussian Process Transfer Learning
- Investigators: Majid Zamani (PI), Morteza Lahijanian, and Eric Frew
- Sponsor: National Science Foundation
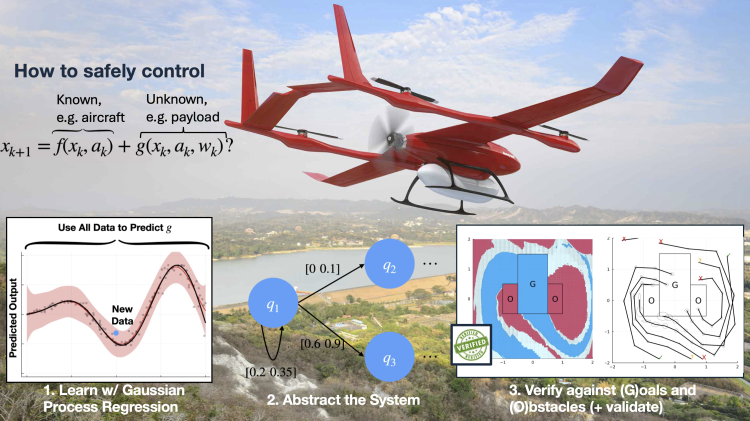
This project proposes a novel and rigorous methodology for the design of embedded control software for safety-critical cyber-physical systems (CPS) with complex and possibly unknown dynamics by embracing ideas from control theory, formal verification in computer science, and Gaussian processes (GPs) from machine learning.
Old Projects
Targeted Observation by Radars and UAS in Supercells (TORUS) and Targeted Observation by Radars and UAS of Supercells - Left-flank Intensive Experiment (TORUS-LItE)
The Targeted Observation by Radars and UAS of Supercells (TORUS) projects are conducted by more than 50 scientists and students deploying a broad suite of cutting-edge instrumentation into the US Great Plains during the 2019 and 2023 storm seasons. TORUS aims to use the data collected to improve the conceptual model of supercell thunderstorms (the parent storms of the most destructive tornadoes) by exposing how small-scale structures within these storms might lead to tornado formation.
ALPACA: Autonomous Learning with Probability & Abstraction for Competency Awareness
This project developed ALPACA (Autonomous Learning with Probability & Abstraction for Competency Awareness), a general framework for competency-aware autonomous agents, particularly those based on reinforcement learning (RL). ALPACA provides insight into RL agent competencies and empowers users to examine and constrain agent behavior, facilitating trust building with human teammates and dramatically improving safety for real-world applications.
Multi-vehicle Collaboration with Minimal Communications and Minimal Energy
This project developed a hierarchical autonomous mission planning and response capability for Autonomous Underwater Vehicles (AUVs) to address the challenges associated with long duration operations. The research is innovating approaches to the exchange of information between collaborating vehicles enabling onboard decision-making to perform effectively despite communication limitations imposed by the underwater maritime environment.
MARBLE: Multi-agent Autonomy with RADAR-based Localization for Exploration
The DARPA Subterranean, or "SubT", Challenge seeks novel approaches to rapidly map, navigate, and search underground environments during time-sensitive combat operations or disaster response scenarios. As a response to the challenge, MARBLE is a small team of autonomous robotic drones (ground, legged, and aerial) equipped to deploy a temporary, highly adaptable wireless mesh network and use it to simultaneously map, navigate and search the underground environment’s tunnels, identify artifacts and communicate information to an above-ground relay station.
Targeted observation and seeding using autonomous unmanned aircraft systems
The main goal of this research is to develop and assess an autonomous UAS that utilizes in-situ real time data to sense, target and implement seeding. This project addresses an innovative approach towards autonomous enhancement of precipitation: to develop new sensing technologies, to create new data assimilation tools, to design novel targeted sampling and delivery strategies, and to integrate them into an unmanned aircraft system (UAS) for real-time, autonomous guidance of rainfall enhancement operations.
I/UCRC Phase 2: Center for Unmanned Aircraft Systems: I/UCRC for Unmanned Aircraft Systems
The Center for Unmanned Aircraft Systems (C-UAS) was established in 2012 and is an Industry/University Cooperative Research Center involving Brigham Young University, the University of Colorado at Boulder, Virginia Tech, the University of Michigan, and Texas A&M University. The center is the only National Science Foundation-funded unmanned aircraft research center.
Coordinated Persistent Airborne Information Gathering: Cloud Robotics in the Clouds
This project investigated coordinated energy-aware information-gathering by dynamic, data-driven reasoning across four inter-related layers: the sensing layer that focuses on information-theoretic formulations of mission tasks; the communication layer that learns models of networked communication behavior for improved coordination in denied or stressed environments; the environment layer whereby the dynamics of the atmosphere drive aircraft performance; and the platform layer where sensors embedded into the UAS platform provide novel flight performance data.
Severe-storm Targeted Observation and Robotic Monitoring (STORM)
This project addresses the development of autonomous self-deploying aerial robotic systems (SDARS) that will enable new in-situ atmospheric science applications through targeted observation.
User-Adaptive Assurances for Enhancing Trust
This project will investigate the closed loop interactions between assured autonomy and user trust. This project investigates a model-based approach to understanding how user trust evolves in systems consisting of a supervising user and an autonomous agent.
Scalable Cooperative Tracking of Moving RF Ground Targets
This work will develop a new approach to decentralized sensor fusion and trajectory optimization to enable multiple networked UAS assets to cooperatively localize moving RF signal sources on the ground in the presence of uncertainties in ownship states and sensing models. Our approach ties together model predictive planning with the recently developed idea of factorized distributed data fusion, which allows each tracker vehicle to ignore state uncertainties for other vehicles and absorb new target state and local model information without sacrificing overall estimation performance.
Project Storm
Project Storm leverages the CU-Boulder’s proven expertise and extensive capability in nomadic, integrated collection of real-time supercell data using unmanned aircraft systems (UAS) to better predict tornadogenesis and dramatically increase Tornado Warning lead-time. CU-Boulder collaborates with an established network of government, academic, and industry partners to improve measurement and collection of supercell data. The CU-Boulder Earth Lab works closely with IRISS to process and distribute datasets for improved tornado forecasting techniques.
Project Forest
Project Forest will employ CU-Boulder’s highly sophisticated unmanned aircraft infrastructure for remote sensing, data collection, and monitoring of ecosystem health - such as vegetation growth and tree distribution. Earth Lab will then process and analyze collected data in collaboration with the Cooperative Institute for Research in Environmental Sciences (CIRES) and the Institute of Arctic and Alpine Research (INSTAAR), also located in Boulder, to inform future ecological and conservationist endeavors.
Persistent Information-Gathering with Airborne Surveillance and Communication Networks in Fading Environments
The purpose of this collaborative effort is to develop and evaluate a hierarchical framework for real-time, path planning for persistent information-gathering tasks in fading communication environments. Novel features of the proposed work are learning the radio environment and background winds; consideration of the energy that can be gained from wind field patterns (energetics); and a persistent, communication-aware information-based formulation of sensing tasks (informatics) that can integrate multiple sensing modalities.
Collaborative Research: IUCRC: FRP: Network Enabled Airborne Autonomy
This effort will investigate the value of utilizing cloud robotics techniques for network-enabled airborne autonomy. Algorithms will be designed and assessed that allow cooperating unmanned aircraft to access dispersed cloud computing resources. This infrastructure will be used to perform complex computation in support of autonomous perception, planning, and learning tasks.
Collaborative Research: RAPID: Integration of Unmanned Aircraft System (UAS) into the Program for Research on Elevated Convection with Intense Precipitation
Funded by the National Science Foundation (NSF), the goal of this project is to further the knowledge of the nature of elevated convection with heavy rain. The University of Colorado is teaming with the University of Missouri and the University of Nebraska to integrate unmanned aircraft into the PRECIP field campaign.
Efficient Reconfigurable Cockpit Design and Fleet Operations using Software Intensive, Networked and Wireless Enabled Architecture (ECON)
The purpose of this project is to investigate the utility of software-intensive, networked, wireless, reconfigurable cockpit design for safe and efficient fleet operations. A large collaborative team is being led by the NASA Ames Research Center. We will make specific contributions in the area of cybersecurity for networked operations.