
Home
Our future in space involves miniaturized satellites for low-cost and rapid access to space, frequent and sustained operations in cislunar space, agile and autonomous spacecraft that can plan paths with little or no dependence on an analyst, on-orbit servicing for sustainability, in-space assembly of critical infrastructure, formations for multi-point measurements, and spacecraft visiting the farthest reaches of our solar system. Across these architectures, form factors, and destinations is a common thread: spacecraft operating in complex, multi-body systems where trajectory analysis, design, and prediction can be considered as a critical enabling and/or enhancing technology.
Inspired by this future, the Bosanac group focuses on developing new strategies for spacecraft trajectory analysis, design, and prediction within chaotic multi-body gravitational systems.
To achieve this goal, we use interdisciplinary techniques such as dynamical systems theory, data mining, machine learning, and path-planning. By developing these strategies, we aim to:
- Enable new missions with new spacecraft form factors, architectures, and objectives via innovative trajectories that mitigate the impact of technology gaps and operational limitations, and
- Map transport pathways in support of knowledge discovery and space situational awareness
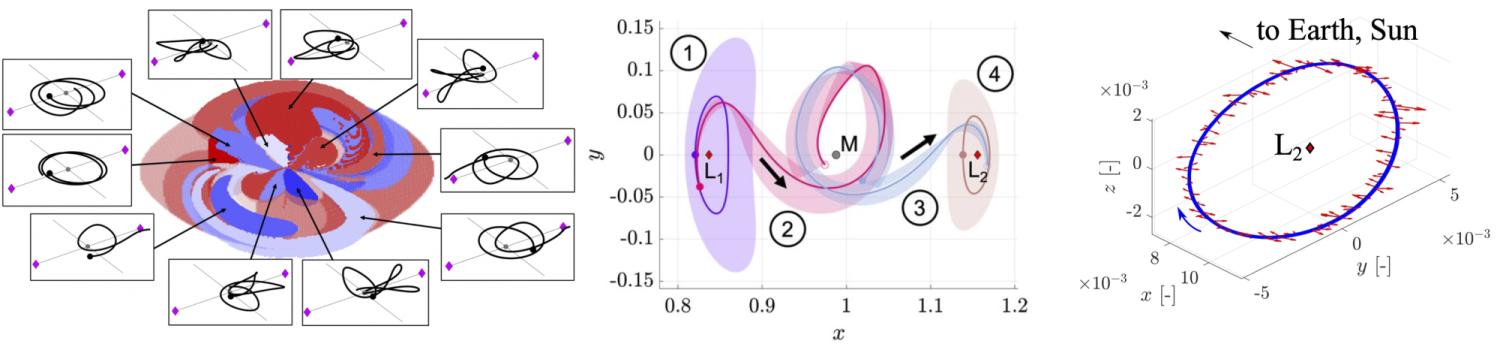
Image credits:
- Left: Bonasera, S; Bosanac, N, 'Applying Data Mining Techniques to Higher-Dimensional Poincaré Maps in the Circular Restricted Three-Body Problem,' November 2021, Vol. 133, No. 51, Celestial Mechanics and Dynamical Astronomy, DOI: 10.1007/s10569-021-10047-3.
- Center: Smith, T.R.; Bosanac, N, ‘Motion Primitive Approach to Spacecraft Trajectory Design in a Multi-Body System,’ September 2023, Vol. 70, No. 34, The Journal of Astronautical Sciences, DOI: 10.1007/s40295-023-00395-7
- Right: Bonasera, S; Bosanac, N; Sullivan, C; Elliott, I; Ahmed, N; McMahon, J, 'Designing Sun-Earth L2 Halo Orbit Stationkeeping Maneuvers via Reinforcement Learning,' February 2023, Vol. 46, No. 2, Journal of Guidance, Control, and Dynamics, DOI: 10.2514/1.G006783