
Quadrilateral
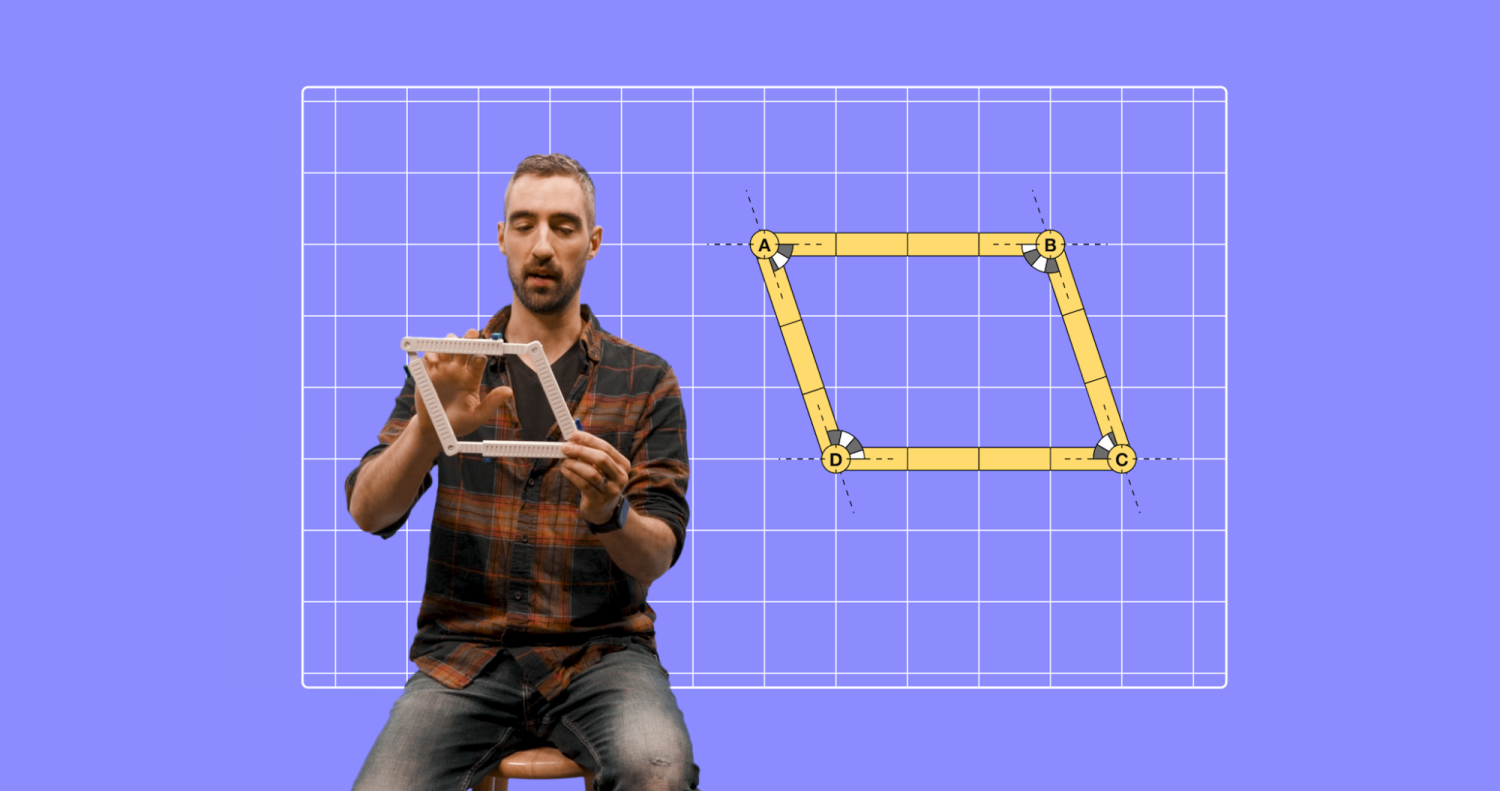
This project brings together researchers in embodied cognition, inclusive design, and mechatronics. With Quadrilateral, learners can explore quadrilateral shapes. Quadrilateral consists of a family of components, including the PhET simulation Quadrilateral, various tangible quadrilateral manipulatives, and any bespoke quadrilateral manipulative you might create. With the Camera Input: Hands feature, you can even use your own fingers to create and explore quadrilateral shapes.
 Inclusive Features
Inclusive Features
Sound and Sonification
Voicing (customizable audio description, like an advanced version of text-to-speech)
Alternative Input
Digitally connected tangible manipulative quadrilateral (TMQ)
Pan and Zoom
Interactive Highlights
Use this link to access the sim with the Camera Input: Hands feature, and explore quadrilaterals with your own fingers
Origin
Dor Abrahamson had been inspired by the physical manipulation of four-sided shapes. He explored and investigated numerous quadrilateral constructions, from handheld devices made from chopsticksand rubber bands to large wood constructions that you can step inside. Some of these early explorations Dor shared with Emily Moore, within the context of advancing research plans to study multimodal learning technologies across diverse learners. Emily imagined coupling a tangible quadrilateral device with a virtual quadrilateral interactive, enabling a uniquely flexible and inclusive range of possibilities for experiencing and learning about quadrilaterals. From there, Jenna Gorlewicz was asked to share her expertise on building a tech-enhanced tangible quadrilateral device, and a three-group collaboration began.
Learn More
Play with the PhET sim Quadrilateral
Find teacher resources and learn about this sim’s inclusive features (Coming soon!)
Team
(in alphabetical order)
- Dor Abrahamson
- Brett Fiedler
- Jenna Gorlewicz
- Jesse Greenberg
- Scott Lambert
- Emily Moore
- Ashton Morris
- Taliesin Smith
- Sofia Tancredi
Publications
- A tangible manipulative for inclusive quadrilateral learning
- Getting a grip on geometry: Developing a tangible manipulative for inclusive quadrilateral learning