
Sensory Feedback Schemes
Discrete Event Sensory Feedback During Teleoperation of a Prosthetic Hand
Biomechatronics Development Laboratory | University of Colorado
Chief Scientist
Artificial sensory feedback schemes can provide users of prosthetic hands with the sense of touch. Here I implemented a novel sensory feedback scheme using vibrotactile stimulation during teleoperation of a prosthetic hand with our collaborators from the BioRobotics Institute at Scuola Superiore Sant'Anna in Pisa, Italy.
Publications
[1] C. Cipriani, J. L. Segil, F. Clemente, R. F. Weir, and B. Edin. “Discrete Event Sensory Feedback During Teleoperation of a Prosthetic Hand.” (in submission).
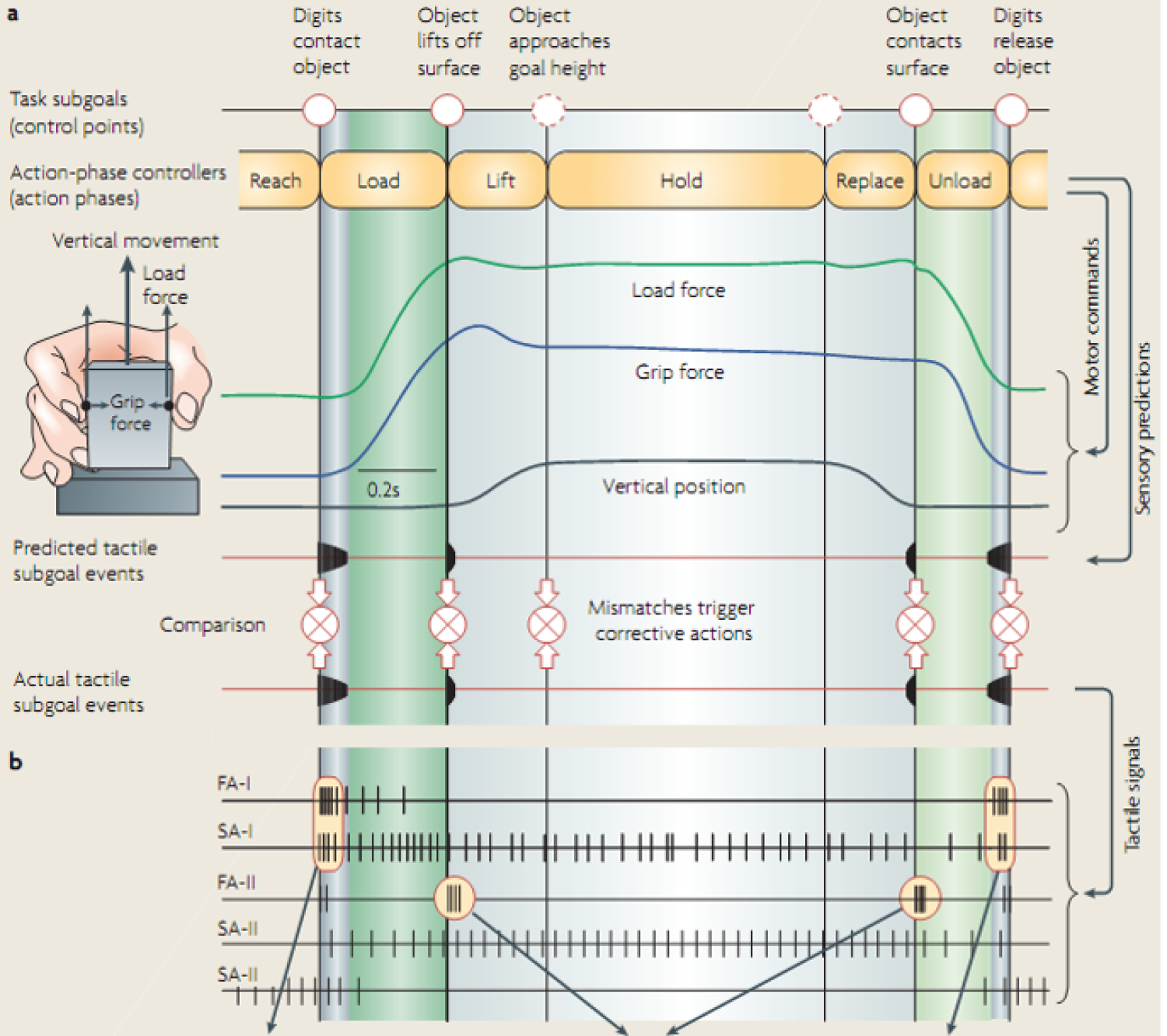
Sensorimotor control required for object manipulation Image credit: Johansson and Flanagan, 2009
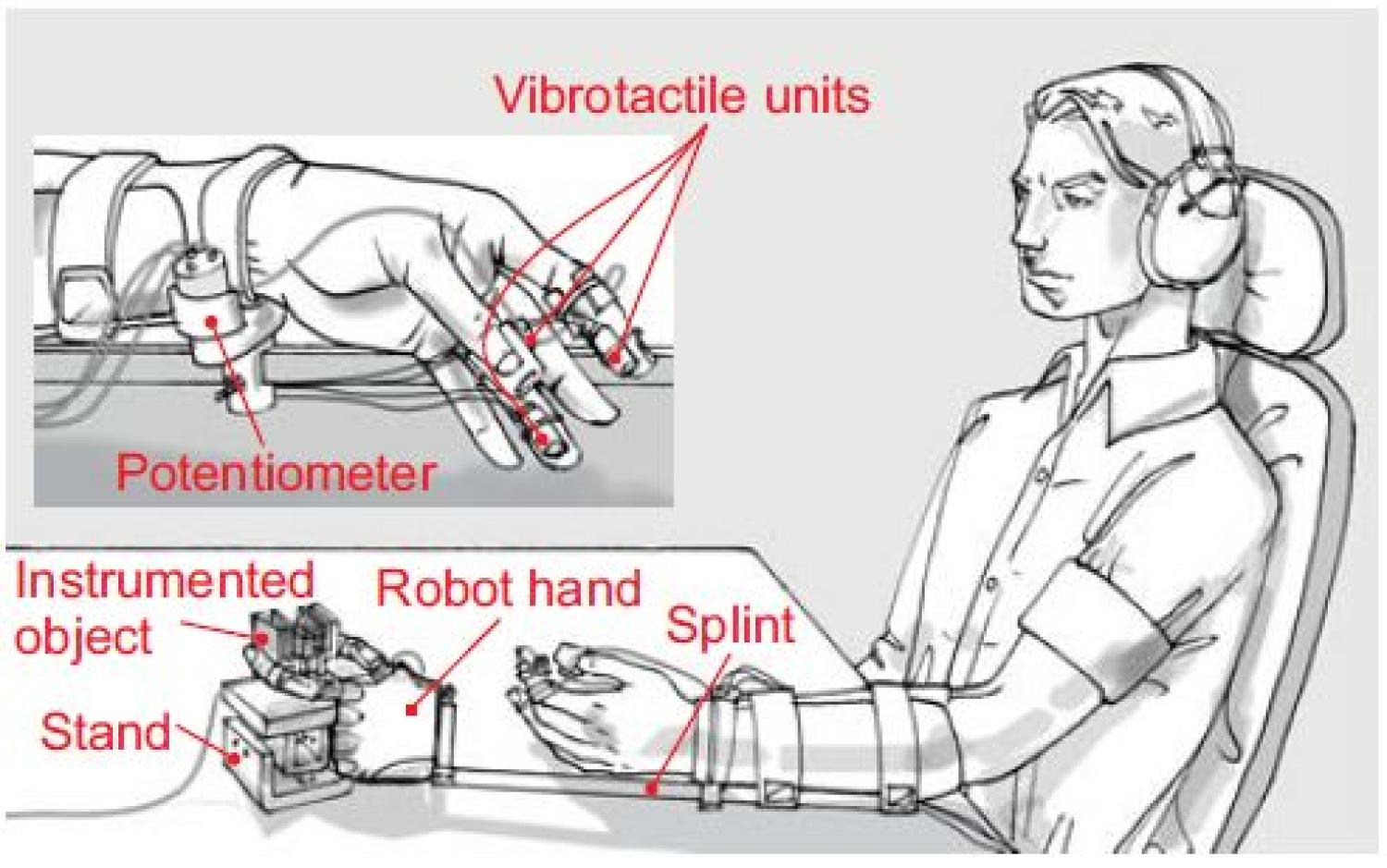
Teleoperation of robotic hand experimental setup Image credit: Cipriani et al., 2014
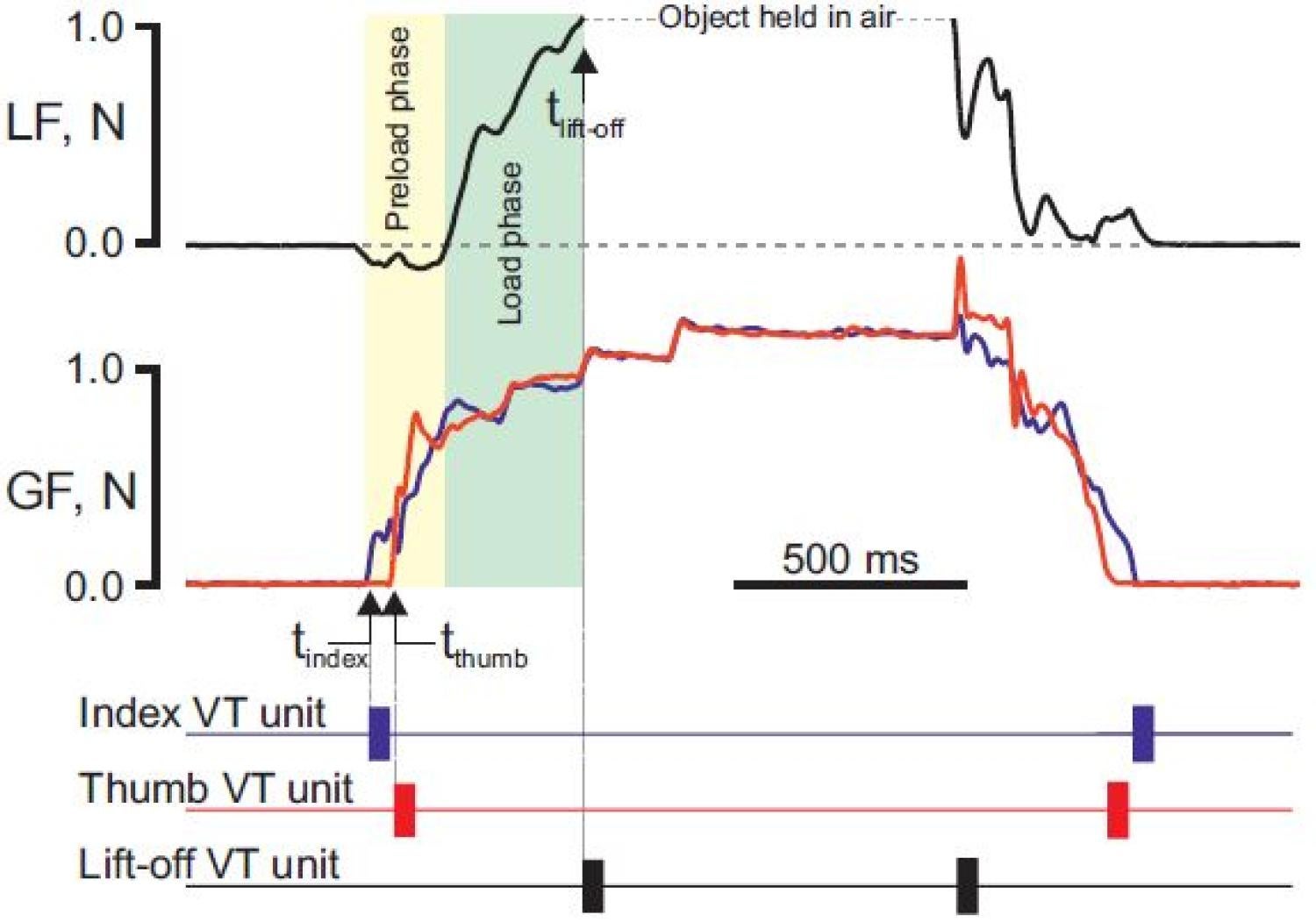
Lift force (LF) and grip force (GF) data with synchronized vibrotactile (VT) stimulation Image credit: Cipriani et al., 2014
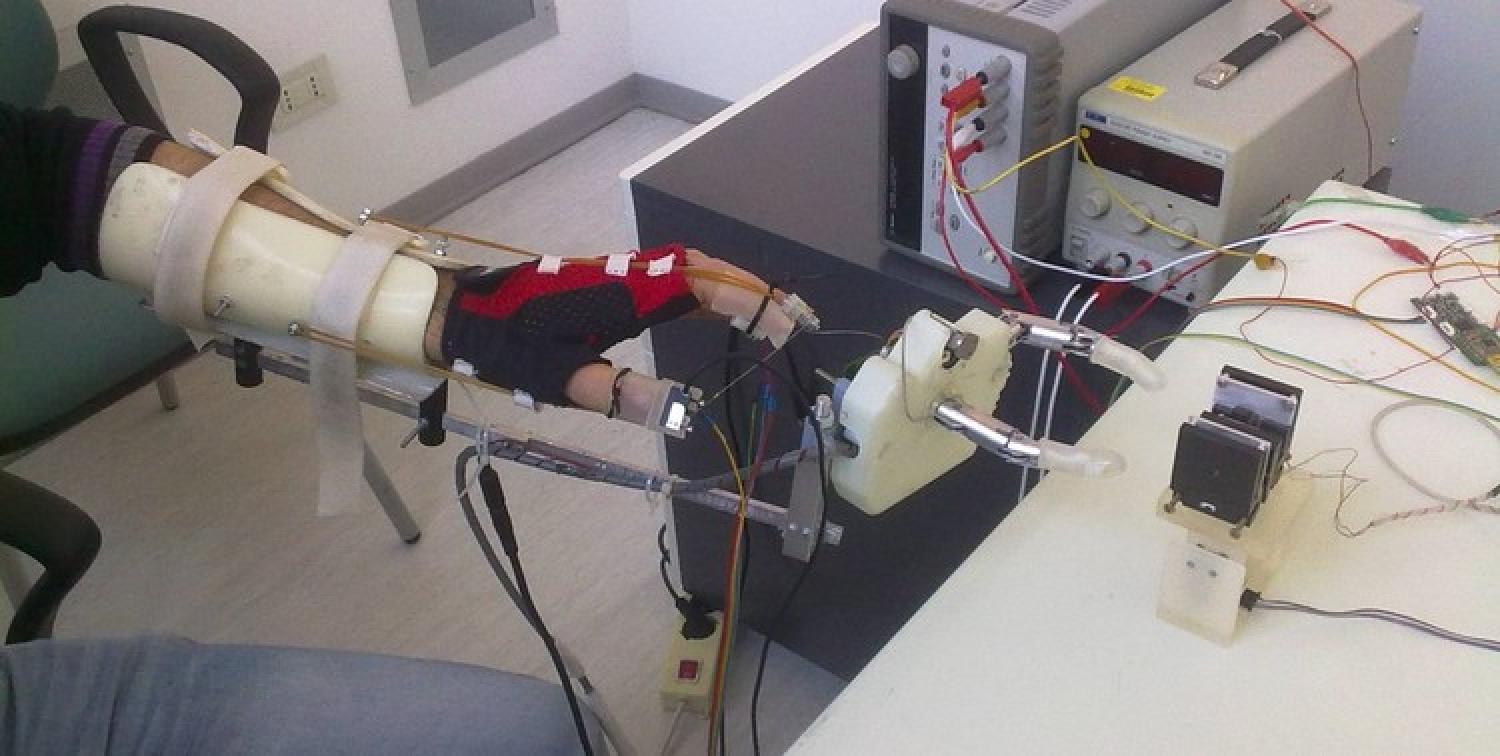
Teleoperation of robotic hand for sensory feedback